

Autonomous navigation and obstacle avoidance system and method for robot
An autonomous navigation and robot technology, applied in the field of robot navigation, can solve the problems of large minimum distance, small measurement distance, long measurement distance, etc., and achieve the effect of easy operation and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solutions of the present invention will be further described below in conjunction with the embodiments and the accompanying drawings.
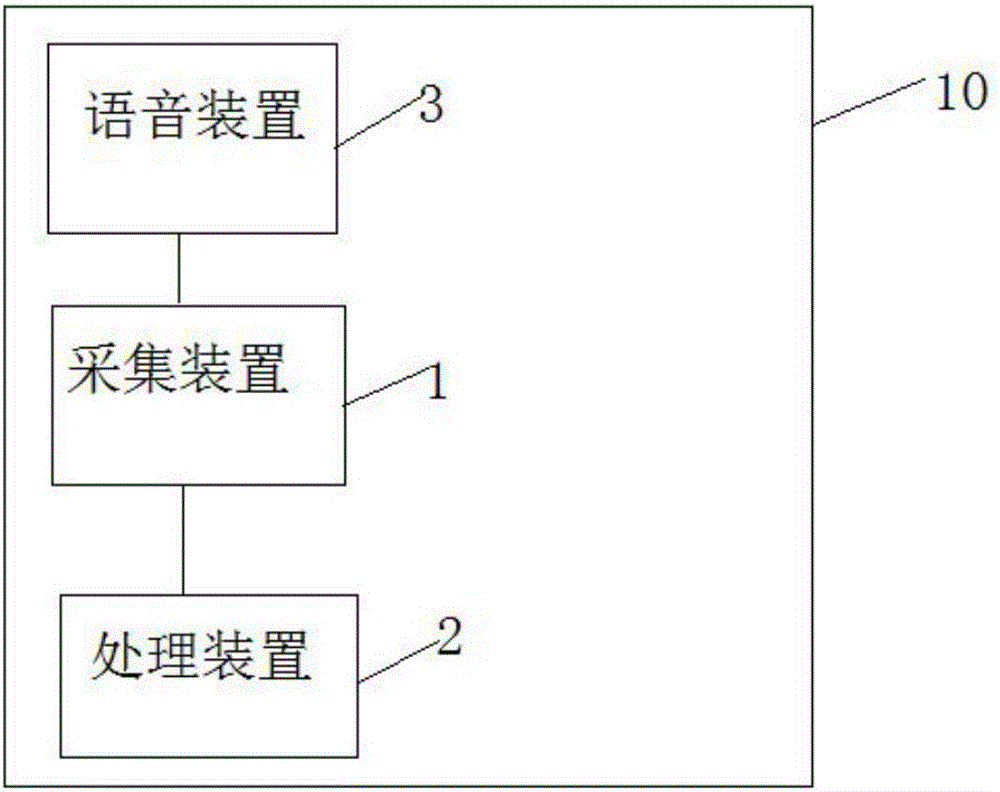
[0031] Such as figure 1 As shown, the present invention provides a robot autonomous navigation obstacle avoidance system 10 comprising:
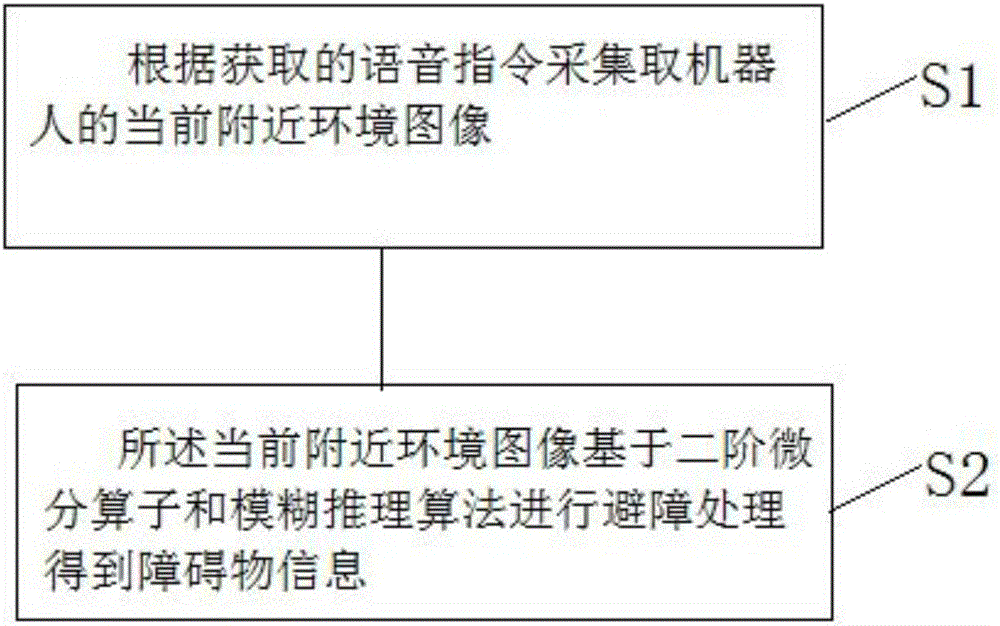
[0032] Acquisition device 1 is used to collect the current surrounding environment image of the robot according to the acquired voice command;
[0033] The processing device 2 is configured to perform obstacle avoidance processing on the current surrounding environment image based on a second-order differential operator and a fuzzy reasoning algorithm to obtain obstacle information.
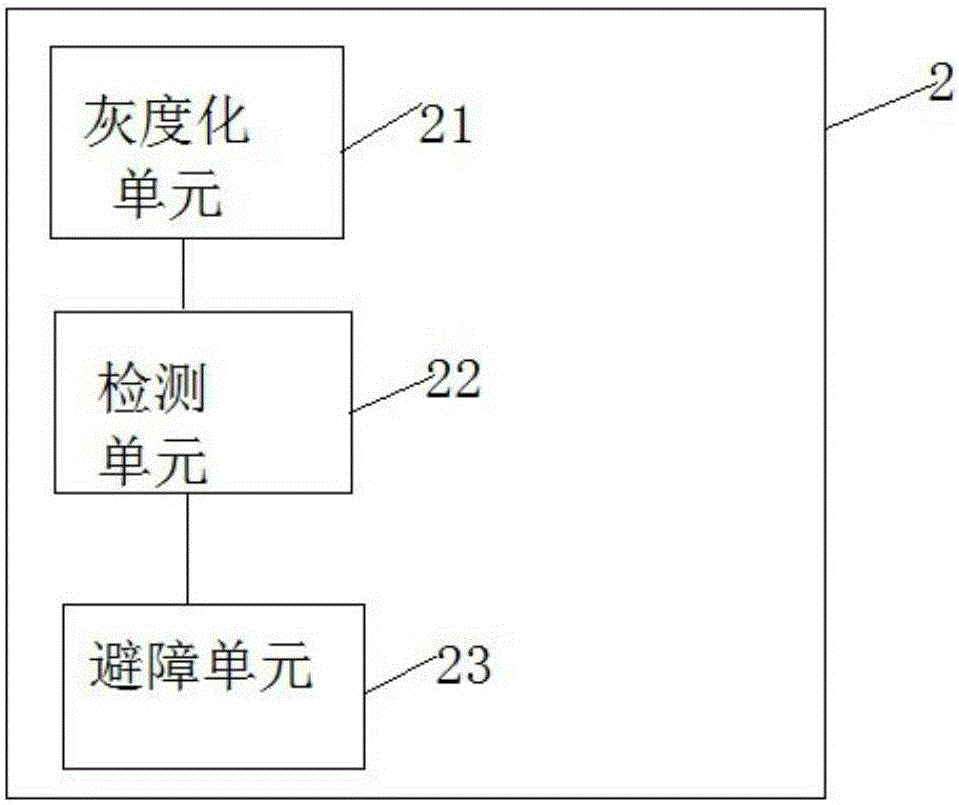
[0034] As preferred, such as figure 2 As shown, the processing device 2 includes:
[0035] A grayscale unit 21, configured to perform grayscale processing on the current surrounding environment image to obtain an obstacle image;
[0036] The detection unit 22 is used to perform edge detection on the ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More