Point cloud extraction method and device for columnar object
An extraction method and an extraction device technology, which are applied in the field of point cloud extraction methods and devices for columnar objects, can solve the problems of columnar object recognition failure and low efficiency of columnar object recognition, and achieve the effect of improving recognition efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
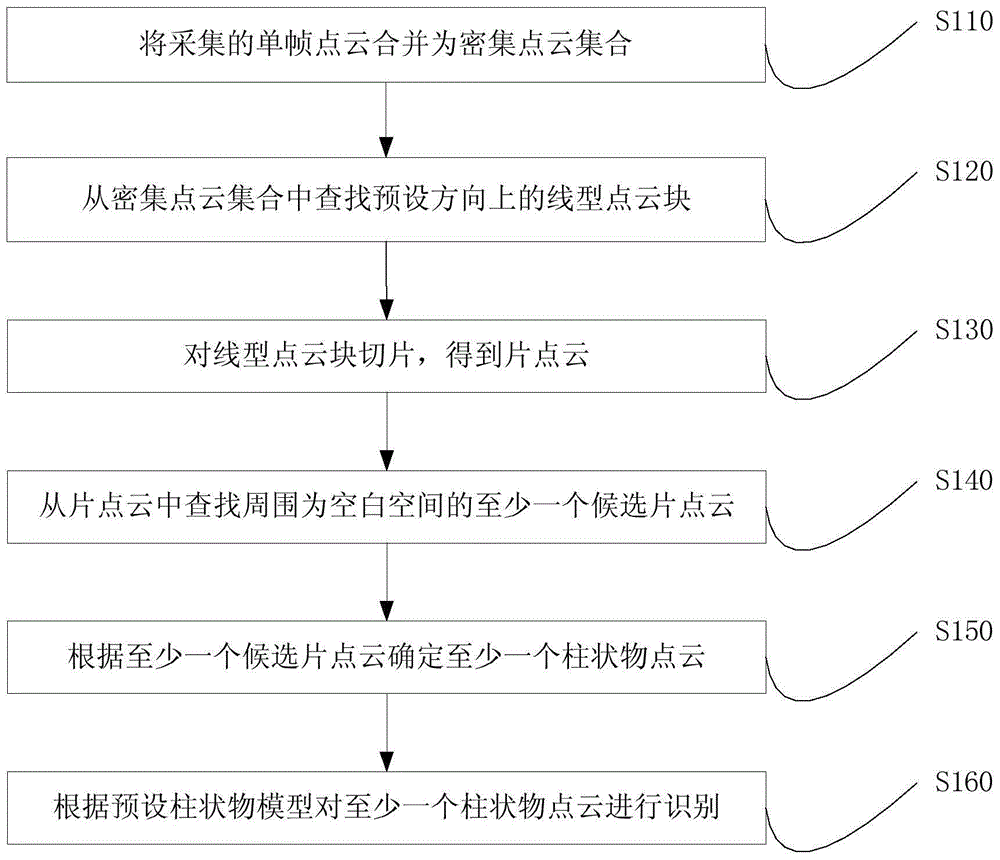
[0029] figure 1 The flow chart of the point cloud extraction method for columnar objects provided by Embodiment 1 of the present invention, this embodiment is applicable to the situation of extracting columnar object point clouds from road point clouds, and this method can be used to extract columnar object point clouds The terminal is executed, and the terminal can be a server, a personal computer, a notebook computer, a tablet computer, a car center console, a smart phone or a smart wearable device, etc., and the method includes:
[0030] S110. Merge the collected single-frame point clouds into a dense point cloud set.
[0031] The laser point cloud acquisition device acquires a single frame point cloud every preset time period (such as 0.1 or 1 second). The road section where the column may exist is judged manually or by machine, and multiple single-frame point clouds corresponding to the road section are merged. When merging, two adjacent single-frame point clouds corresp...
Embodiment 2
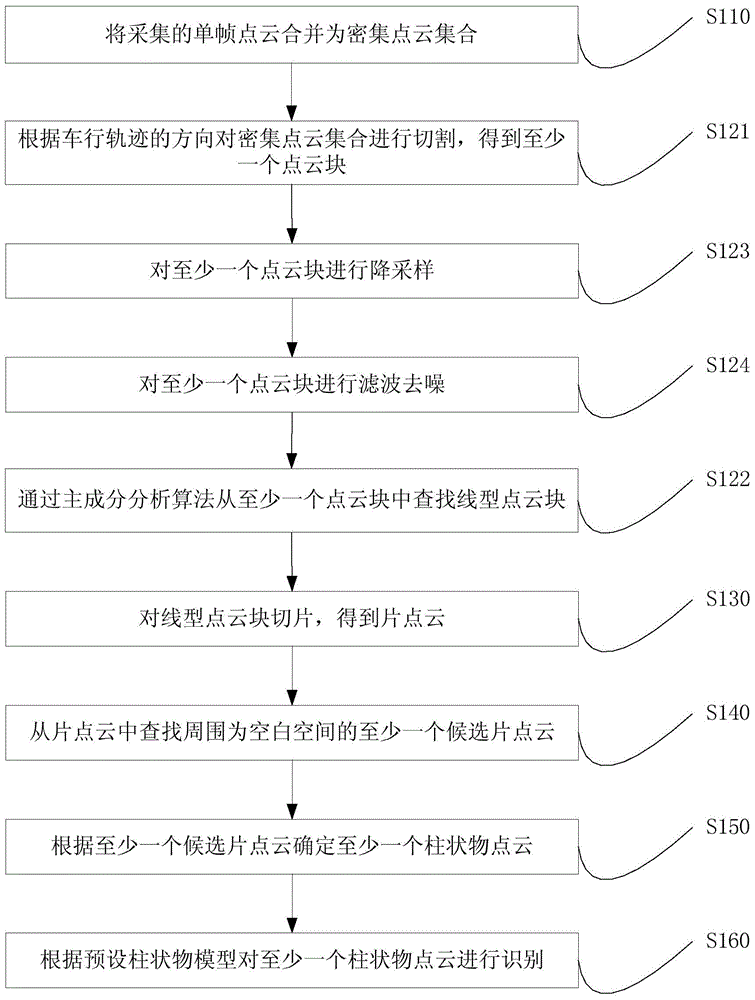
[0046] image 3 The flow chart of the point cloud extraction method for columnar objects provided by Embodiment 2 of the present invention. In the process of implementing the above embodiment, the inventor found that because the single frame road point cloud includes road surface point cloud and roadside guardrail point cloud, traffic lights Point clouds, green belt point clouds, road sign point clouds and even vehicle point clouds, so when multiple single-frame road point clouds are merged into a dense point cloud, the data volume of the dense point cloud is large, which in turn affects point cloud processing speed. Based on this, S120, searching for linear point cloud blocks from the dense point cloud collection can be implemented in the following manner:
[0047] S121. Cut the dense point cloud set according to the direction of the vehicle trajectory to obtain at least one point cloud block.
[0048] When obtaining a single frame point cloud, the vehicle carrying the poin...
Embodiment 3
[0064] Figure 4 The flow chart of the point cloud extraction method for columnar objects provided in Embodiment 3 of the present invention, optional, S130, slice the linear point cloud block to obtain a piece of point cloud, which can be implemented in the following manner:
[0065] S131. Construct a three-dimensional grid.
[0066] The size of the 3D mesh can be defined by the user. The space v occupied by each grid unit of the constructed three-dimensional grid should satisfy: 5cm*5cm*5cm≤v≤30cm*30cm*30cm. Preferably, v=20cm*20cm*20cm.
[0067] S132. Slicing the linear point cloud block according to the three-dimensional grid to obtain a piece point cloud.
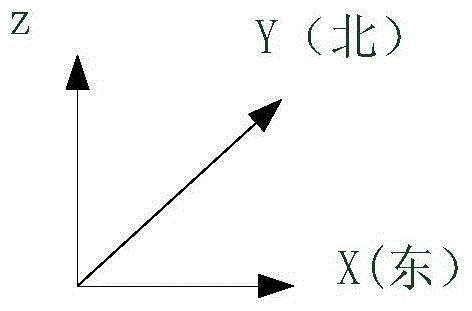
[0068] by figure 2 Take the coordinate system shown as an example. If the direction of the linear point cloud is the z-axis direction, start from the ground and cut the linear point cloud along the horizontal direction every 20cm. A sheet-shaped point cloud is obtained. The thickness of each point cloud in the z-a...
PUM
| Property | Measurement | Unit |
|---|---|---|
| The inside diameter of | aaaaa | aaaaa |
| Outer diameter | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com