

Control method of robot fingers based on conductive sponge
A technology of robotic fingers and conductive sponges, applied in surgical robots, manipulators, manufacturing tools, etc., can solve problems such as excessive grip force of fingers, insensitive corners of robot fingers, etc., and achieve the effect of improving comfort and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to further illustrate the technical means and effects of the present invention to achieve the above objectives, the specific implementation, structure, features and effects of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
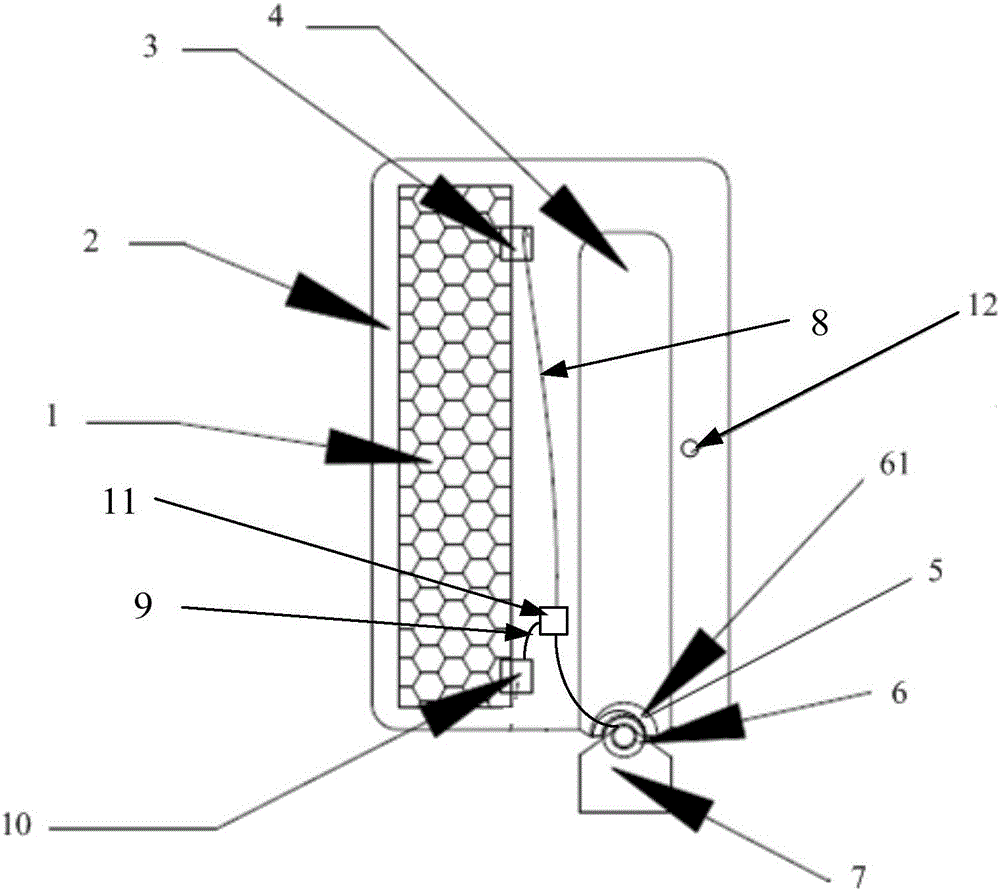
[0025] refer to figure 1 as shown, figure 1 It is a structural schematic diagram of a preferred embodiment of the conductive sponge-based robot finger of the present invention.
[0026] In this embodiment, the robot finger based on conductive sponge includes a finger skeleton 4 arranged on the robot finger, a conductive sponge 1, a silicone sleeve 2, a first resistance measuring electrode 3, a second resistance measuring electrode 10, a first electric wire 8. The second electric wire 9, the first gear 5, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More