Six degrees of freedom intelligent prosthetic arm based on line-driven differential joint
A degree of freedom and line-driven technology, applied in prosthetics, artificial arms, medical science, etc., can solve the problems that the transmission accuracy of the bionic arm cannot be fully guaranteed, it is not suitable for subjects to carry, and the rigidity of the transmission device is low, so as to achieve light weight , reduce the overall mass, increase the effect of rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0026] The specific embodiment: the present invention will be further described below in conjunction with accompanying drawing:
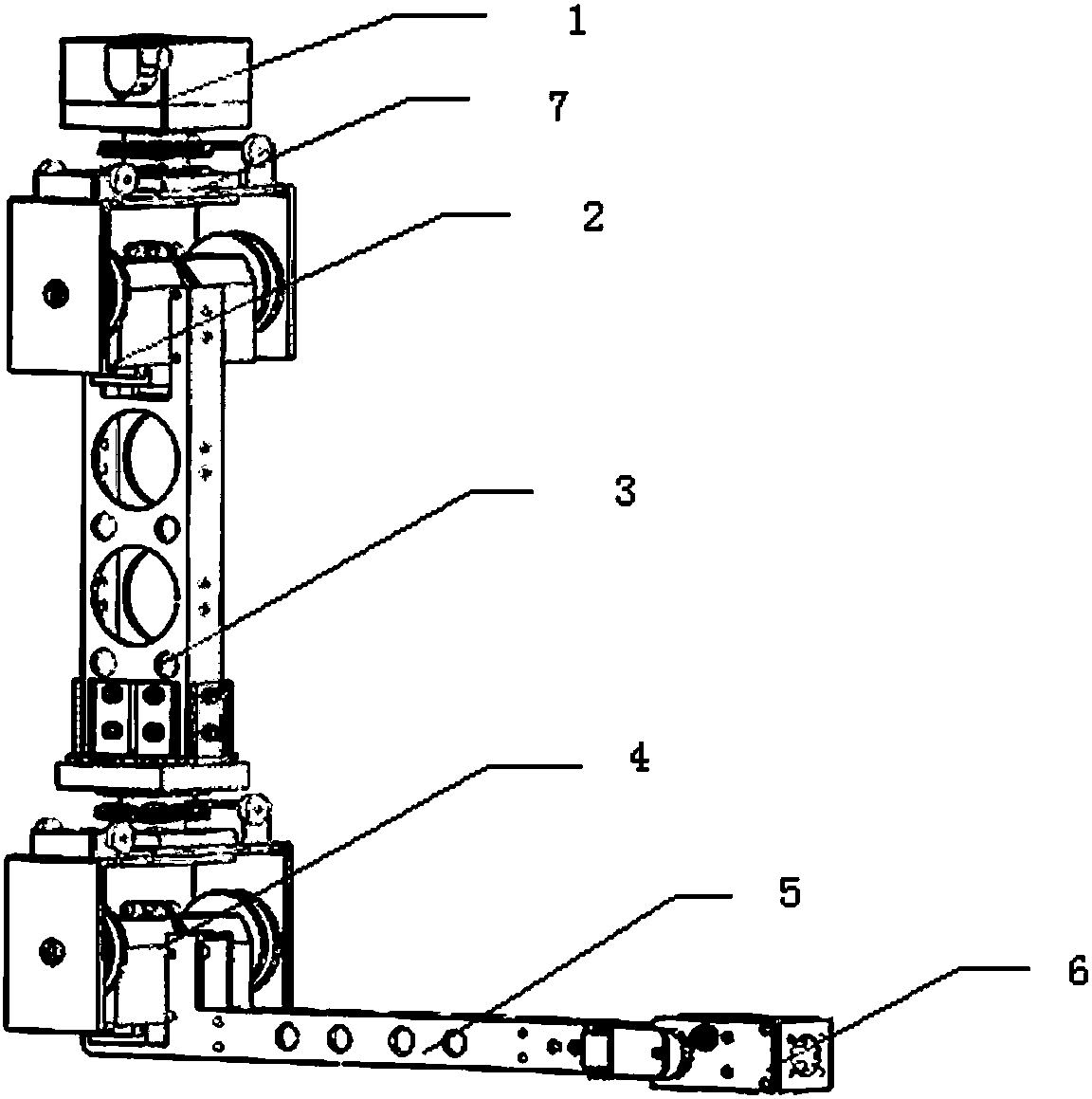
[0027] The present invention relates to a six-degree-of-freedom intelligent artificial arm based on a line-driven differential joint. The artificial arm includes a shoulder joint tensioning device 1, a shoulder joint 2 with two degrees of freedom, a large arm 3, an elbow joint 4, and a forearm 5. And the wrist joint 6 with two degrees of freedom; the tensioning device 1 of the shoulder joint is connected to the shoulder joint 2, the shoulder joint 2 is connected to the upper arm 3, the upper arm 3 is connected to the forearm 5 through the elbow joint 4, and the forearm 5 is connected to the wrist joint 6.
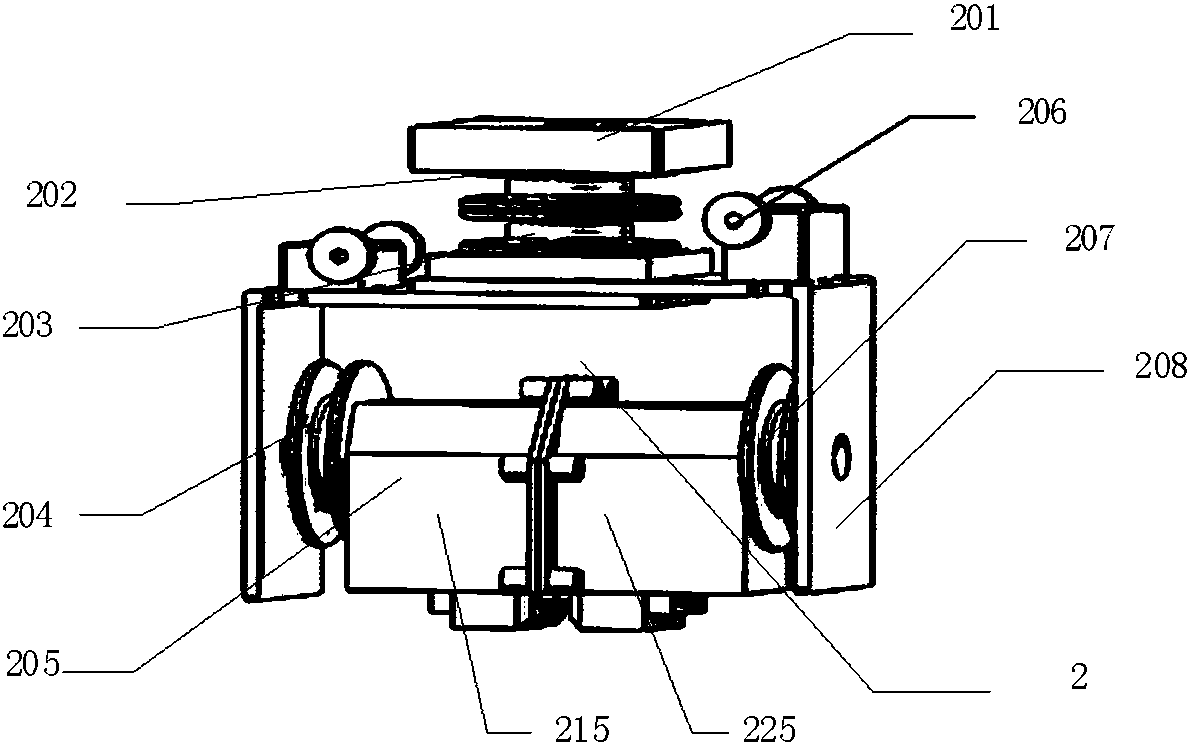
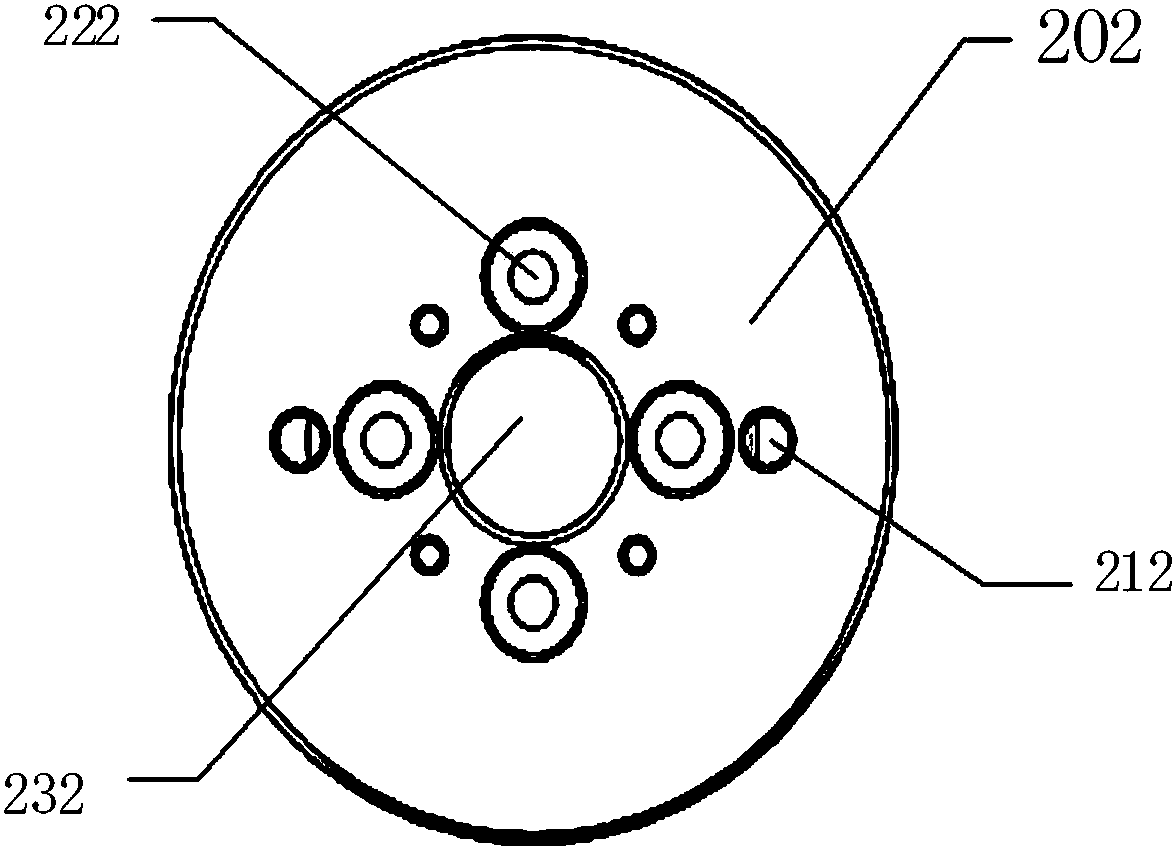
[0028] Shoulder joint structure 2 is a wire-driven differential mechanism, which includes two drive motors 205, a first wire-winding disk 204, a second wire-winding disk 207, a shoulder joint U-shaped base 208, a third wire-winding circle The dis...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap