

An overhead control method for two-frame platforms of airborne photoelectric reconnaissance equipment
A technology of photoelectric reconnaissance and control methods, applied in directions such as navigation through speed/acceleration measurement, which can solve problems such as high cost and complex implementation, and achieve the effects of reducing development costs, improving functions, and expanding application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings.
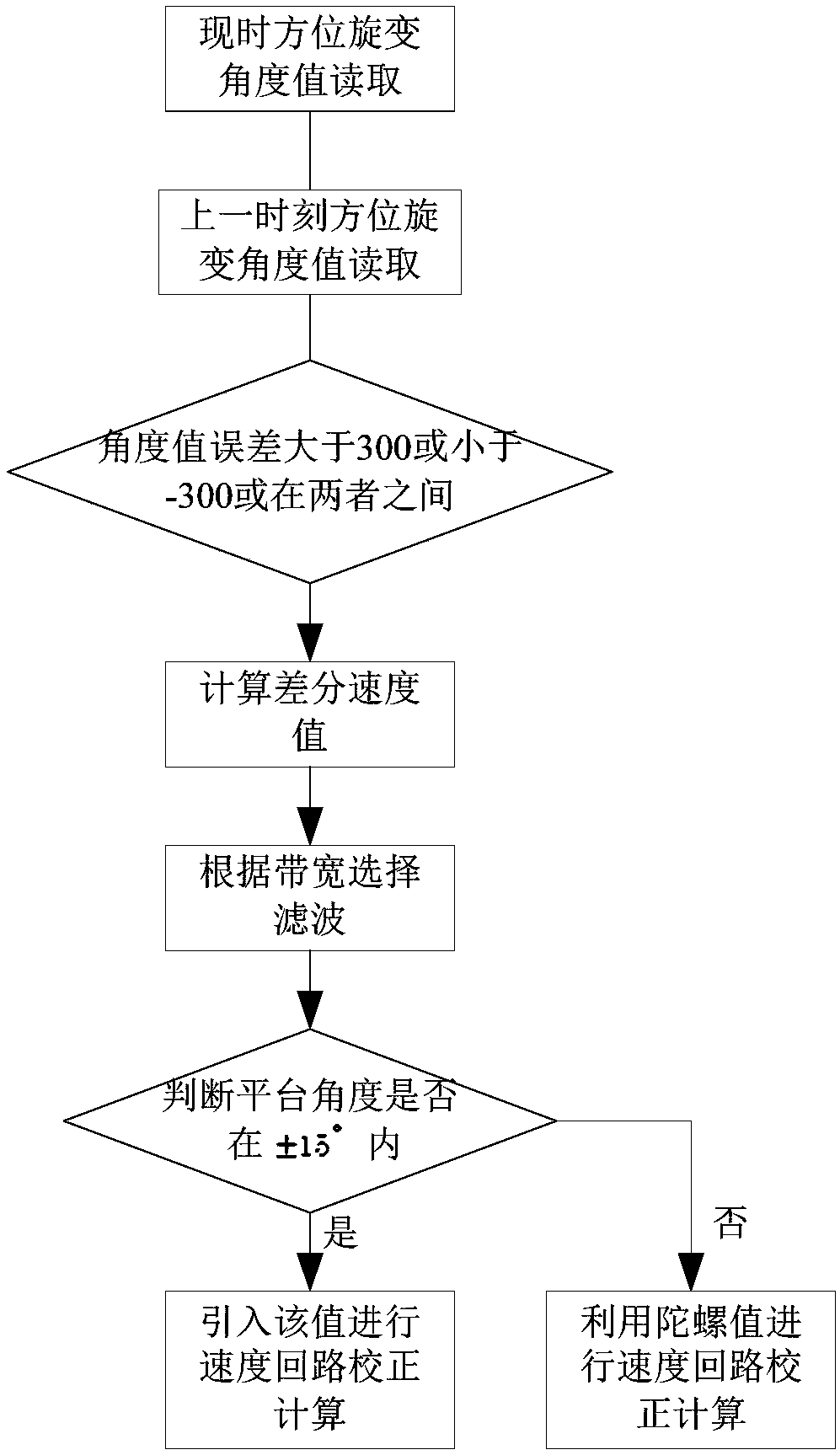
[0022] Such as figure 1 As shown, the airborne photoelectric reconnaissance equipment overhead control method of the present embodiment comprises the following steps:
[0023] 1) Record a certain time t 1 The azimuth frame angle value α 1 and the previous time t of this time 0 The azimuth frame angle value α 0 and the pitch angle β at that moment;
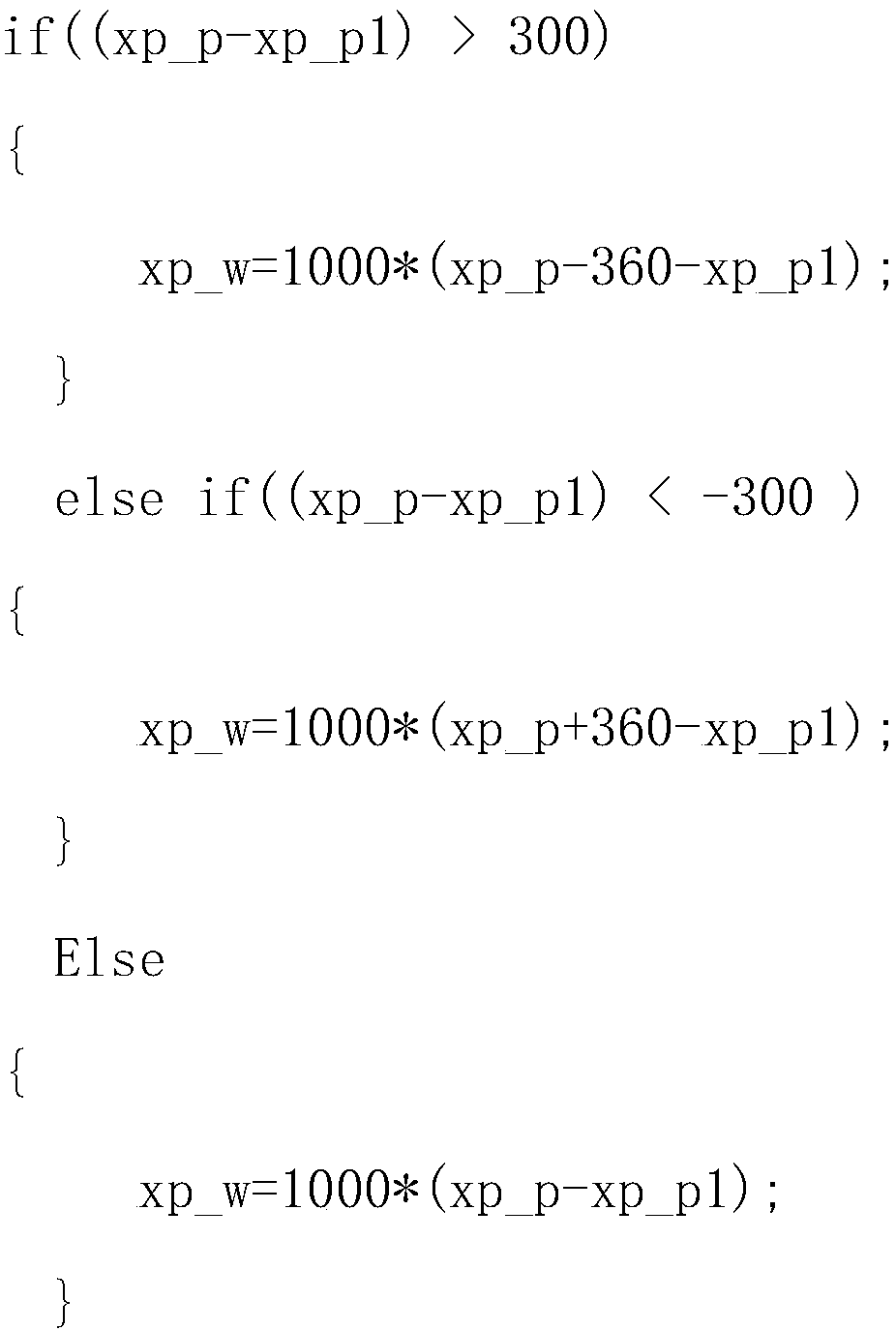
[0024] 2) Calculate the error value Δα of the azimuth frame angle, that is, Δα=α 1 -α 0 , compare the azimuth frame angle error value Δα with the set angle θ to obtain the actual rotation angle error value Δα′ of the azimuth frame, that is, if Δα>θ, then Δα′=α 1 -360°-α 0 ; If Δα1 +360°-α 0 ; If -θ1 -α 0 , where θ>0;
[0025] 3) According to the two time intervals in step 1), calculate the rotational angle differential velocity value V of the azimuth frame, that is, V=Δα' / (t 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More