Automatic flight surface cleaning robot for photovoltaic array
A photovoltaic array and surface cleaning technology, applied in the direction of cleaning methods using gas flow, photovoltaic power generation, photovoltaic modules, etc., can solve the problems of high installation track cost, poor adaptability, and low degree of automation, so as to improve dust removal efficiency and reduce requirements Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
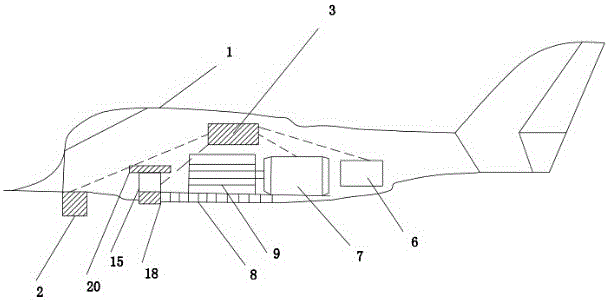
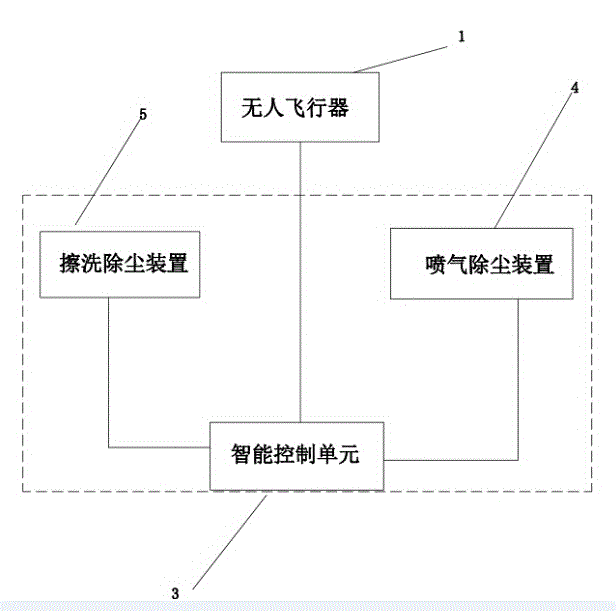
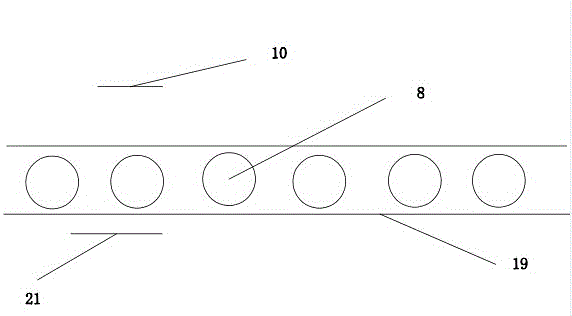
[0026] see as Figure 1-Figure 7 As shown, the technical solution adopted in this embodiment is: an automatic flying photovoltaic array surface cleaning robot, which includes an unmanned aerial vehicle 1, a high-definition camera 2, an intelligent control unit 3, a jet dust removal device 4, a scrubbing dust removal device 5 and a power supply 6 The high-definition camera 2 is arranged on the bottom of the front end of the unmanned aerial vehicle 1, an intelligent control unit 3 is installed on the top of the unmanned aerial vehicle 1, and a jet dust removal device 4 and a power supply 6 are installed on the bottom of the unmanned aerial vehicle 1 interior; the jet dust removal device 4 is powered by a DC motor 7 , an air pump 9 and an air nozzle 10; the DC motor 7 is connected to the power supply 6 and the air pump 9 respectively, and the air pump 9 is connected to an external pipeline 19, and the pipeline 19 is arranged on the brackets 21 on both sides of the unmanned aerial ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More