

Antiskid control method for electric automobile with four wheels and hubs
A technology of electric vehicle and control method, which is applied in the direction of electric vehicle, control drive, control device, etc., can solve the problem that control parameters are difficult to be defined.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
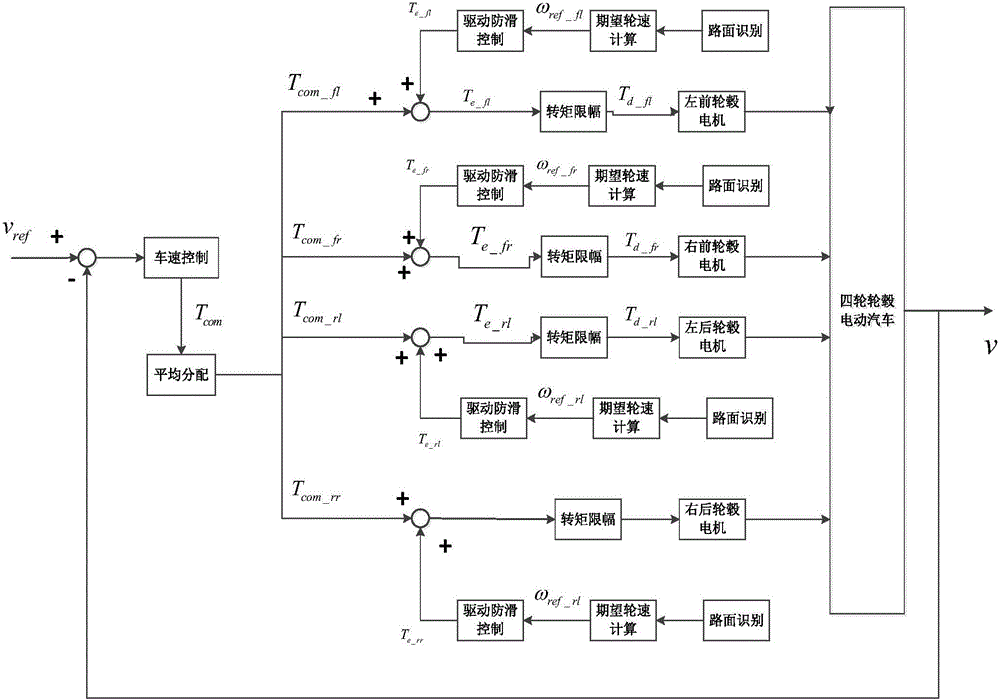
[0067] figure 1 It is a schematic diagram of anti-skid control of a four-wheel hub electric vehicle of the present invention.
[0068] In this example, if figure 1 As shown, a four-wheel hub electric vehicle drive anti-skid control system includes: road surface recognition module, expected wheel speed calculation module, wheel drive anti-skid control module, vehicle speed control module and limiter module.
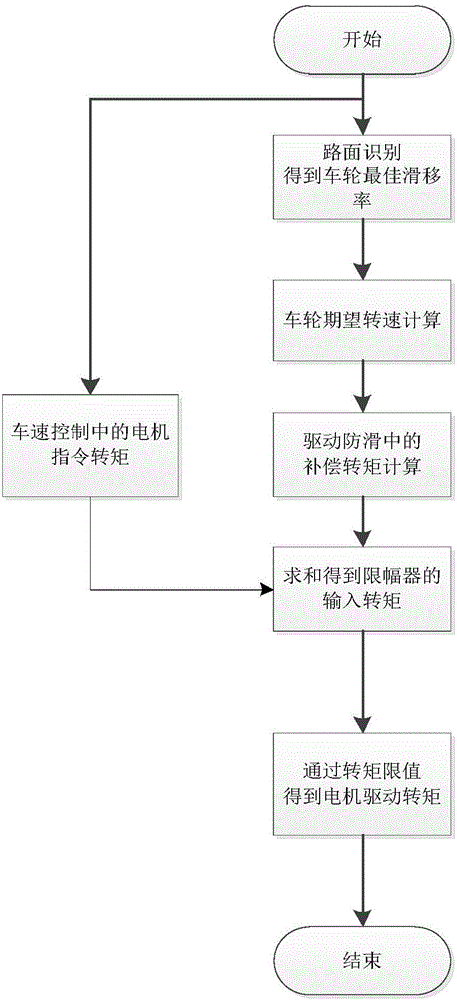
[0069] Among them, the road surface recognition module estimates the road surface of the electric vehicle in real time, and obtains the optimal wheel slip ratio s opt_ij .
[0070] Expected wheel speed calculation module, based on the optimal wheel slip ratio s obtained by road surface recognition op t _ij , vehicle speed v and wheel radius r, calculate the expected wheel speed ω of the wheel ref_ij .
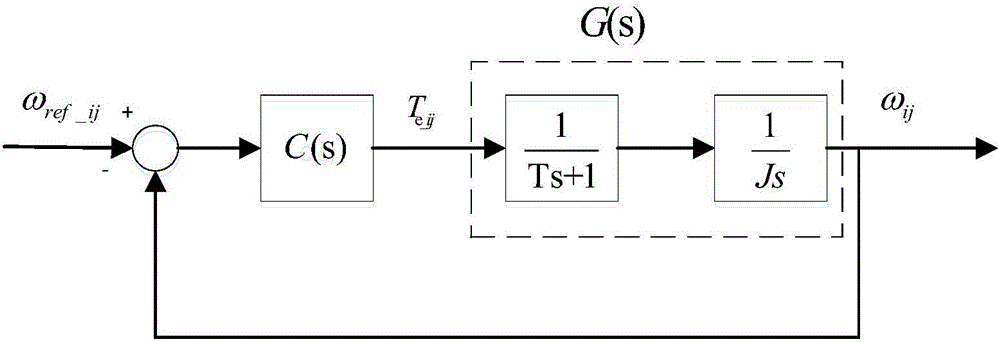
[0071] The wheel drive anti-slip control module obtains the compensation torque T of the wheel according to the state of the wheel e_ij . If the wheel speed ω i j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More