

A dulcimer robot wrist tapping control method and tapping device
A robot and wrist technology, which is applied in the field of dulcimer robot wrist percussion control, can solve the problems of troublesome debugging, serious mechanization, and inconvenient use, and achieve the effects of eliminating the sense of pause in vocalization, anthropomorphic vocalization, and avoiding mechanical sensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments, and the content of the present invention is not limited to the following embodiments.
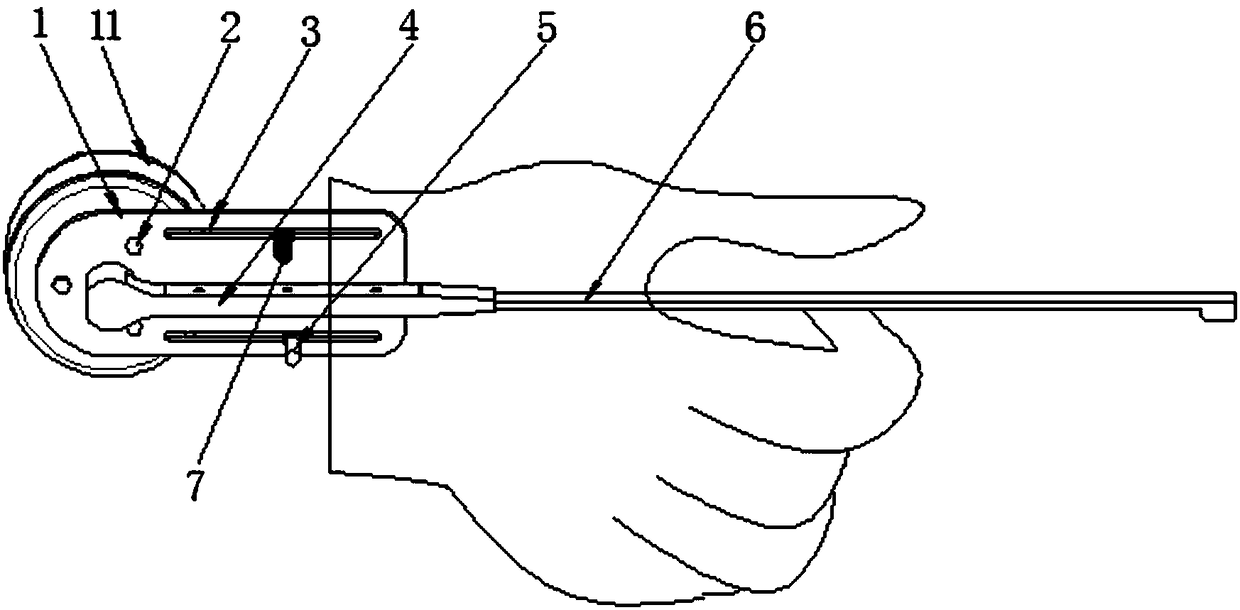
[0027] The dulcimer robot wrist percussion control method provided by the invention comprises the following steps:
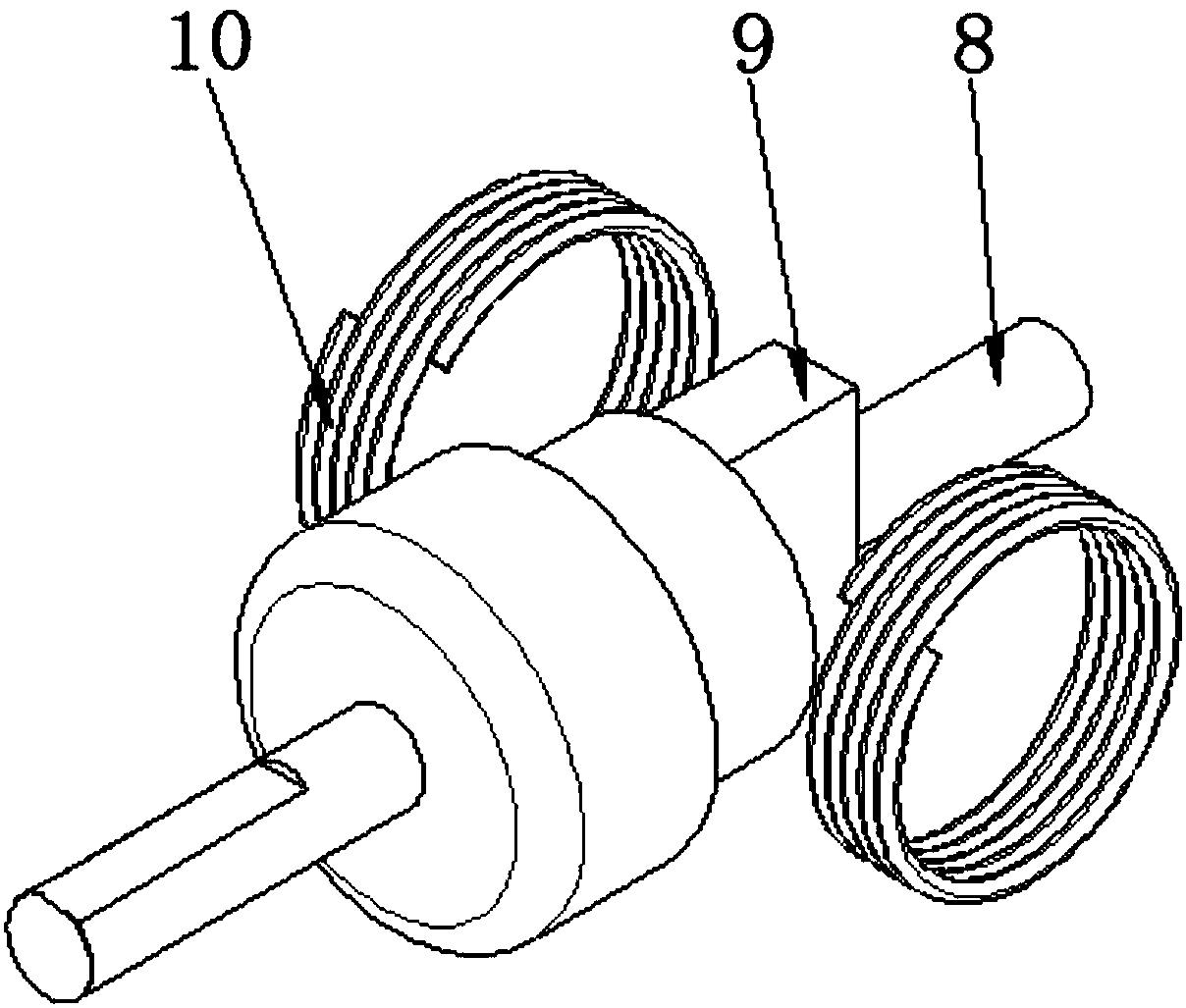
[0028] (1) Connect the bamboo with the rotating shaft of the rotating device. The bamboo is perpendicular to the rotating shaft of the rotating device. Limiting devices are installed on both sides of the bamboo. The rotating device can be a steering gear, or an iron core fixed on an iron A drive unit composed of a permanent magnet on the core and two coils on both sides of the permanent magnet;
[0029] (2) Pass positive current to the rotating device, the rotating shaft of the rotating device drives the bamboo to rotate, the bamboo rotates until it touches the limit device, the bamboo is damped to complete the percussion, and the energizing pulse of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More