SLAM device integrating multiple vehicle-mounted sensors and control method of device
A vehicle-mounted sensor and multi-sensor technology, which is used in measurement devices, instruments, surveying and navigation, etc., can solve the problems affecting the accuracy of motion estimation, the effective range of depth values, positioning and mapping deviation, etc., to improve the effect and accuracy. performance, improved robustness and accuracy, improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043]The accompanying drawings are for illustrative purposes only, and should not be construed as limitations on this patent; in order to better illustrate the present embodiment, some parts of the accompanying drawings may be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable to the artisan that certain well-known structures and descriptions thereof may be omitted from the drawings. The positional relationships described in the drawings are only for exemplary illustration, and should not be construed as a limitation on the present patent.
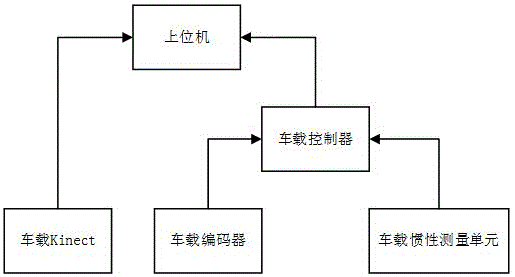
[0044] like figure 1 As shown, a SLAM device integrating on-board multi-sensors includes on-board sensors, on-board encoders, on-board inertial measurement units, on-board controllers, and a host computer; the on-board encoders and on-board inertial measurement units are connected to the on-board controller. , the on-board controller is connected with the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More