

Method and device for robot motion synchronization
A robot and motion technology, applied in the computer field, can solve problems such as different characteristics of robots, out-of-synchronization of robot dancing, and different ground friction, etc., to achieve the effect of ensuring the performance effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
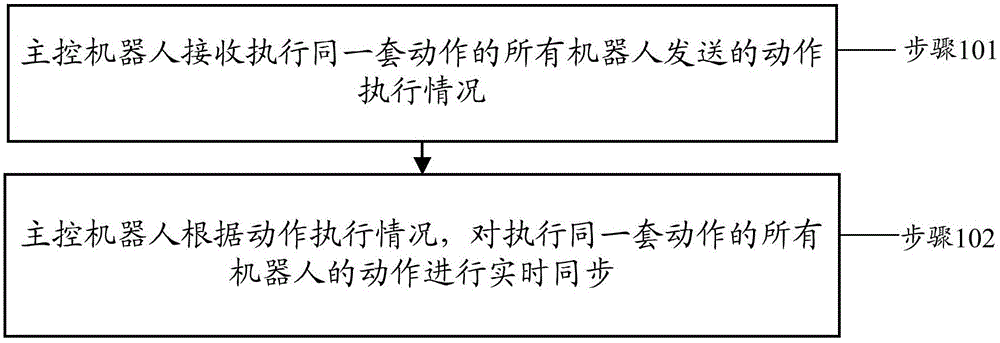
[0018] According to an embodiment of the present invention, a robot motion synchronization method is provided, figure 1 It is a flowchart of the robot action synchronization method in the first embodiment of the present invention, such as figure 1 As shown, the robot action synchronization method according to the embodiment of the present invention includes the following processing:
[0019] Step 101: The master robot receives the action execution status sent by all the robots performing the same set of actions;
[0020] Step 102: The master robot synchronizes the actions of all robots performing the same set of actions in real time according to the execution of the actions.
[0021] Step 102 specifically includes:
[0022] Case 1: The master robot determines that only the actions performed by the robots less than or equal to the predetermined number are not synchronized according to the execution of the actions, and then notify the backward robot to skip the unexecuted backward motion...
Embodiment 2
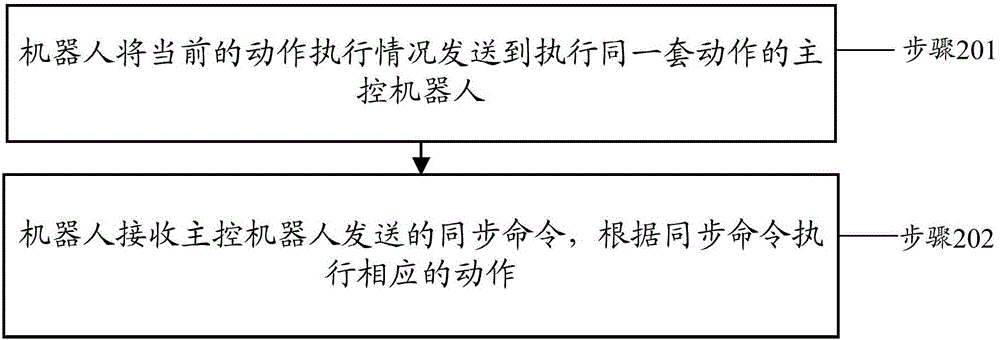
[0028] According to an embodiment of the present invention, a robot motion synchronization method is provided, figure 2 It is a flowchart of the robot action synchronization method in the second embodiment of the present invention, such as figure 2 As shown, the robot action synchronization method according to the embodiment of the present invention includes the following processing:
[0029] Step 201: The robot sends the current execution status of the action to the master robot that performs the same set of actions;
[0030] Step 202: The robot receives the synchronization command sent by the master robot, and executes corresponding actions according to the synchronization command.
[0031] Step 202 specifically includes the following processing:
[0032] Method 1: The robot receives the synchronization command sent by the master robot, skips the unexecuted backward motion according to the synchronization command, and executes the current motion directly, or executes a loop motion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More