

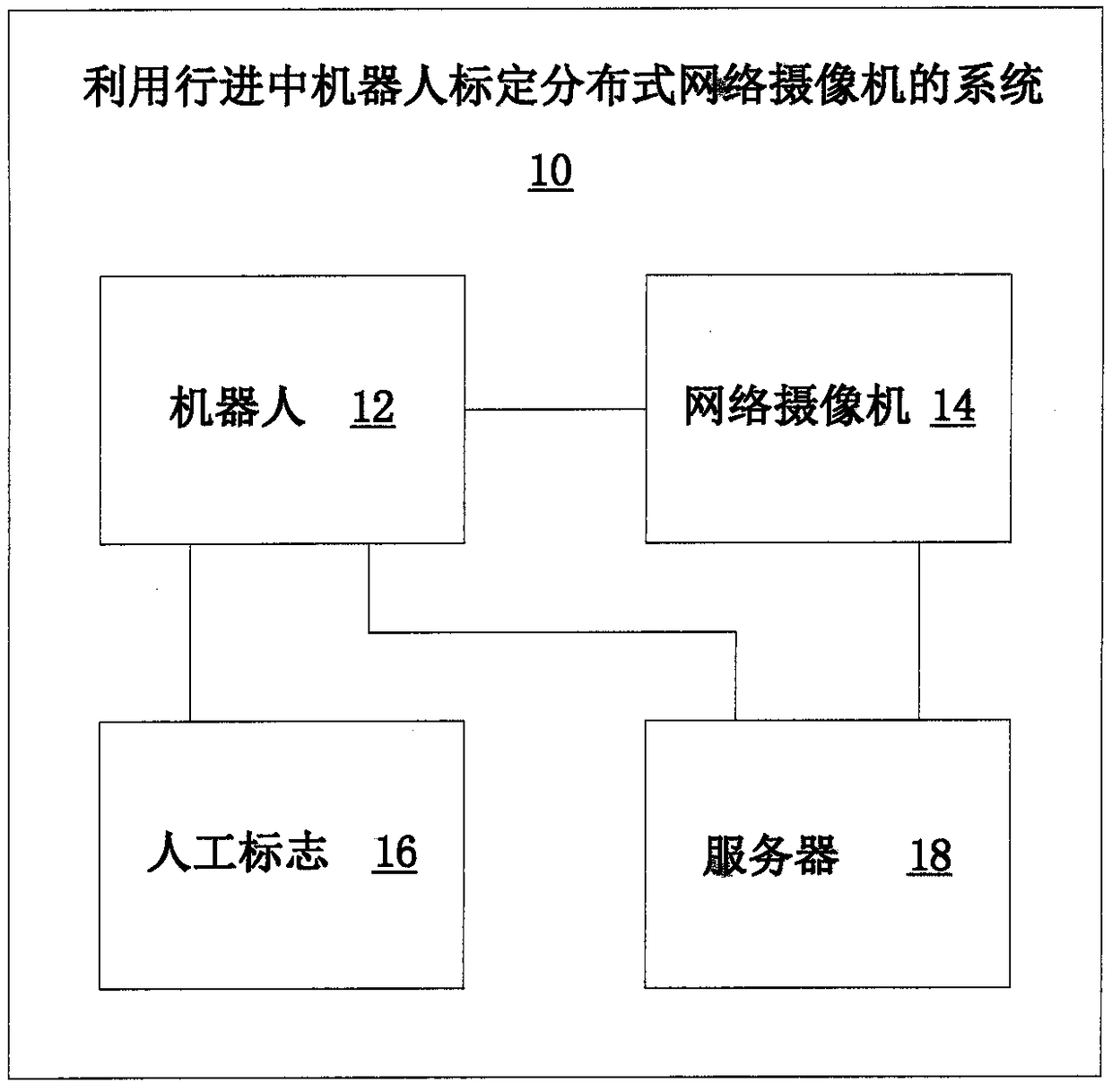
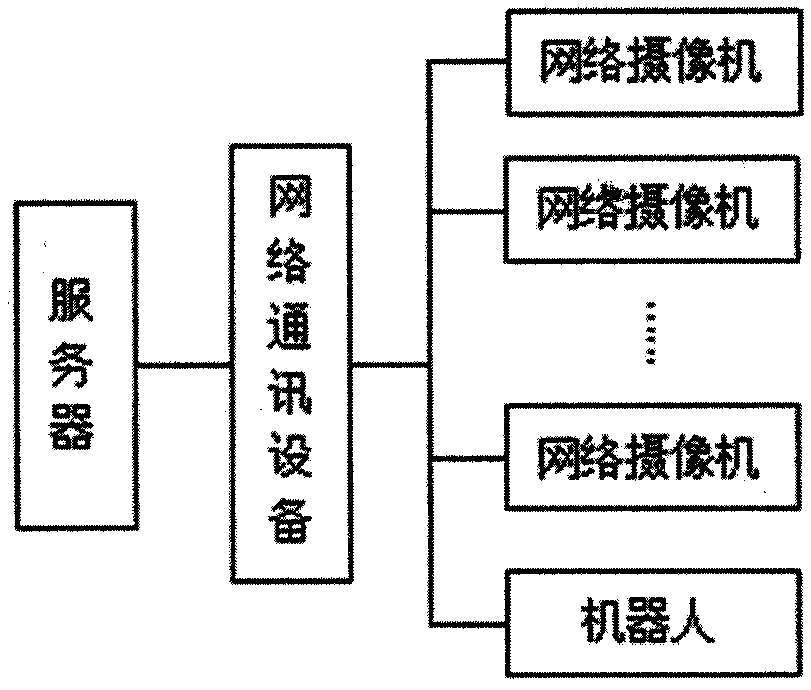
System and method for calibrating distributed network cameras using moving robots
A network camera and distributed network technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of lack of positioning and navigation capabilities, increase in the number of network cameras, and cumbersome calibration methods, and achieve fast and convenient calibration, which is conducive to expansion , Set up flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical problems solved by the embodiments of the present invention, the technical solutions adopted and the technical effects achieved are clearly and completely described below in conjunction with the accompanying drawings and specific embodiments. Apparently, the described embodiments are only some of the embodiments of this application, not all of them. Based on the embodiments in the present application, all other equivalent or obviously modified embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention. Embodiments of the invention can be embodied in many different ways as defined and covered by the claims.
[0035] It should be noted that, in the following description, many specific details are given for the convenience of understanding. It may be evident, however, that the present invention may be practiced without these specific details.
[0036] It should be noted tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More