

Raster map building method based on local map splicing
A raster map and partial technology, applied in the field of map creation, can solve problems such as inaccurateness, reduced operating efficiency, difficulty in applying large-scale environmental map construction, etc., and achieve the effect of reducing cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
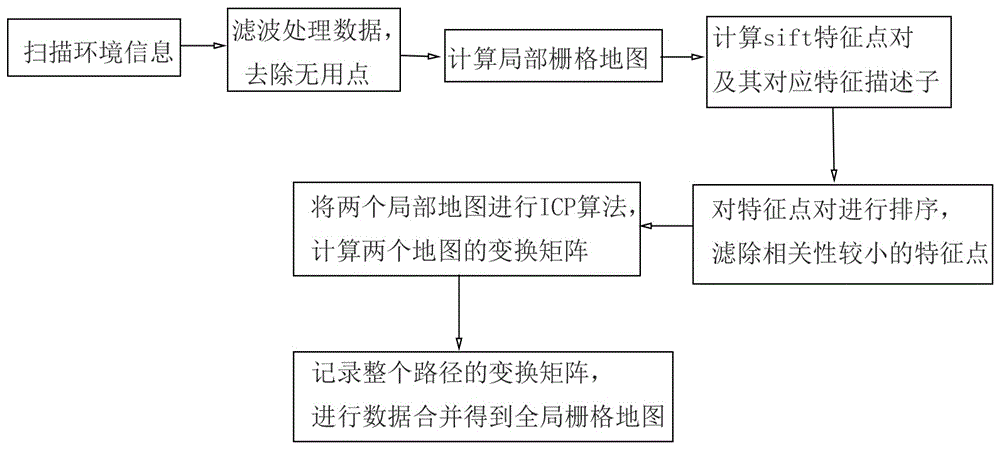
[0019] See attached picture. The grid map creation method described in this embodiment is used on a robot with at least a motion control system, an inertial navigation system, and a laser scanning sensor; it includes the following steps:
[0020] 1) The robot scans and records environmental information through its own laser ranging sensor;
[0021] 2) Filter the messy and irregular scanning data points obtained in step 1) to remove useless points;
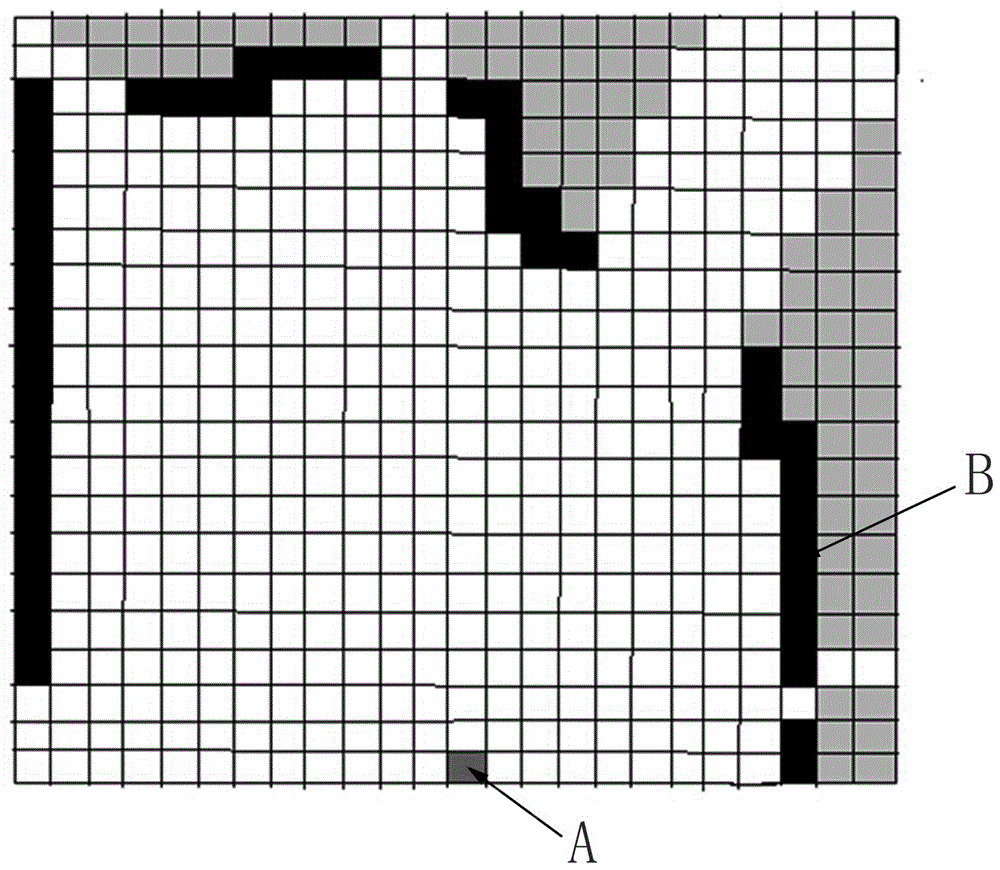
[0022] 3) Calculate the local grid map through the ray tracing method of the filtered data;
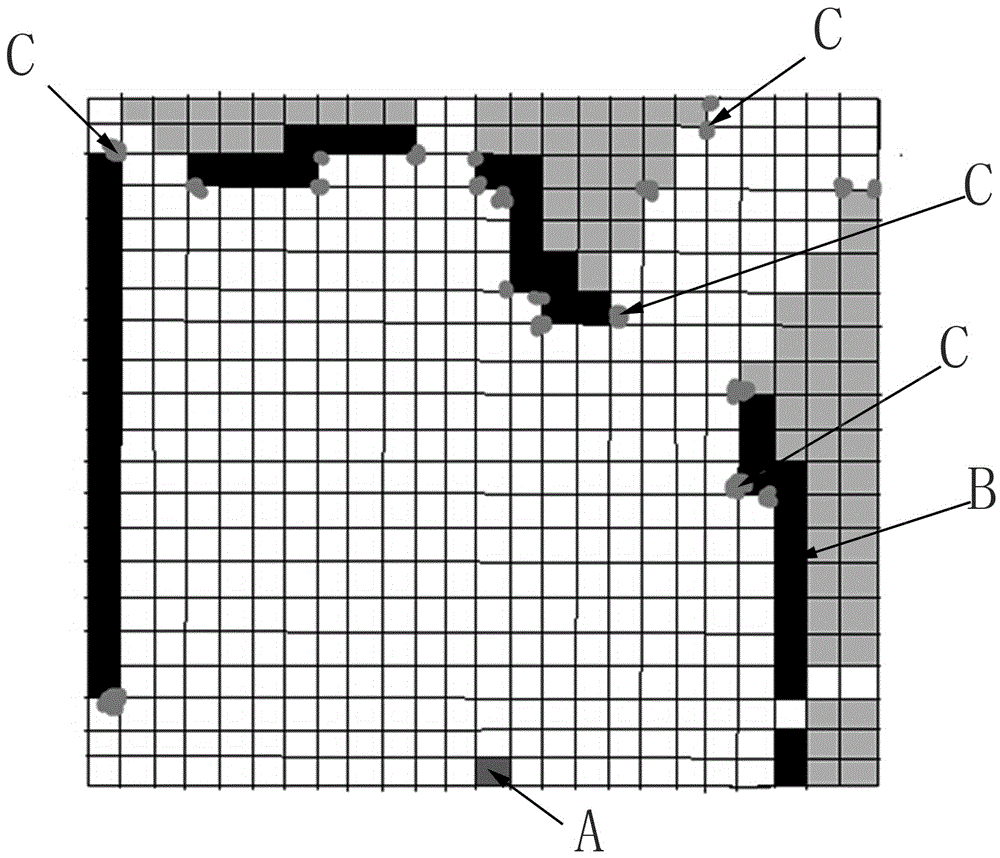
[0023] 4) Calculate the sift feature point pairs and their corresponding feature descriptors of the local grid map under two adjacent poses;
[0024] 5) Sort the feature point pairs according to the correlation of feature descriptors, and filter out the feature points with less correlation of feature descriptors;
[0025] 6) Perform the nearest point iterative algorithm ICP on the local maps in two adjacent poses, and calculate the tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More