

Monocular SLAM (Simultaneous Localization and Mapping) method capable of creating large-scale map
A large-scale, map-based technology, applied in image analysis, image data processing, instruments, etc., can solve problems such as inability to build environmental maps, inflexibility, and inability to guarantee flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings.
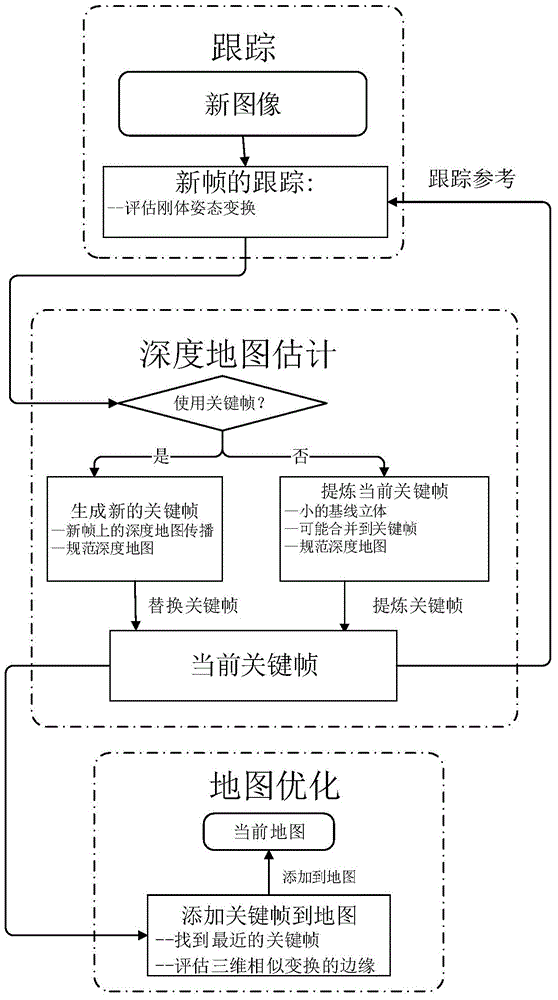
[0034] Such as figure 1 Shown: a kind of monocular SLAM method that can create large-scale map, it is characterized in that: adopt following steps:
[0035] Step 1: Tracking of the new frame: the tracking component continuously tracks the new camera image (640×480 pixels) at a frequency of 30 Hz, and evaluates the rigid body pose of the image relative to the current frame in, Represents a set of Lie-algebra transformations, ξ represents a transformation in the set, initialized with the pose of the previous frame.
[0036] Step 2: Depth map estimation: The component uses the tracked frame to extract or replace the current keyframe, and extracts depth by filtering many frame-by-frame small baseline stereo comparisons plus interleaved spatial orthogonalization; if the camera moves too far, New keyframes are initialized from the existing projected points closest to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More