Vehicle running control method, device and computer equipment
A technology of vehicle driving and control method, applied in the direction of control device, vehicle components, other vehicle parameters, etc., can solve the problems of limited driving level, personnel and property damage, body collision, etc., to achieve high practicability, improve safety and practicality sex, driving safety and personal safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
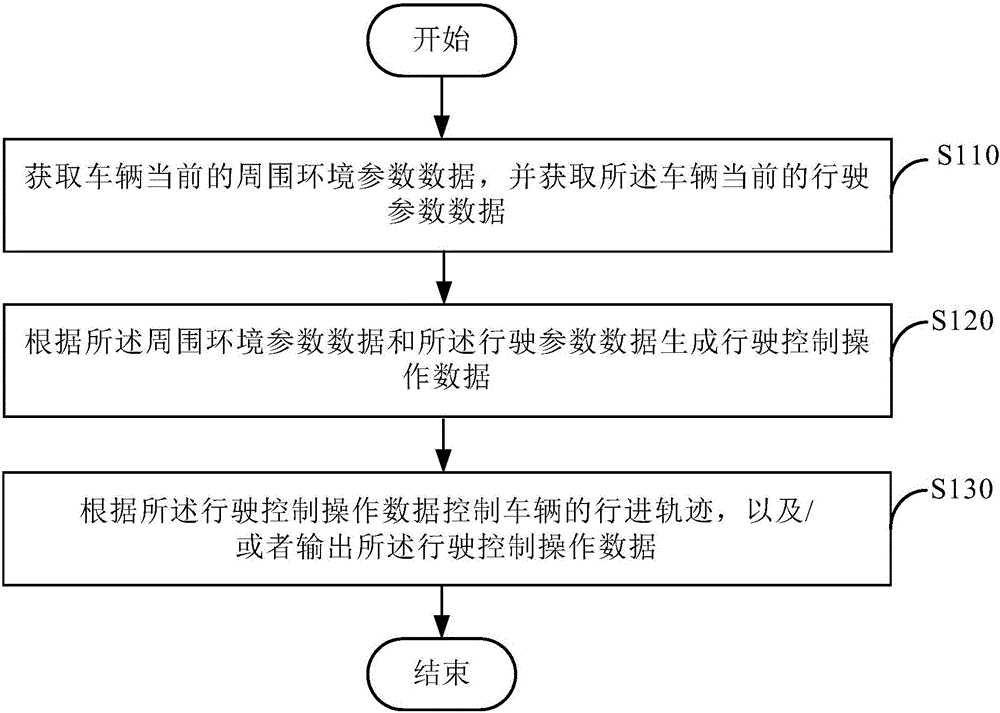
[0017] figure 1 A schematic flow chart showing the vehicle driving control method in Embodiment 1 of the present invention, see figure 1 , the vehicle driving control method in this embodiment includes S110, S120 and S130.
[0018] At S110, the current surrounding environment parameter data of the vehicle is obtained, and the current driving parameter data of the vehicle is obtained.
[0019] In this embodiment, the surrounding environment parameter data may include position information, spacing and / or width of lane marking lines and position information of surrounding obstacles; driving parameter data may include driving speed, tire steering angle and / or vehicle body width. Optionally, the surrounding environment parameter data may also include height information and / or hardness information of surrounding obstacles. Optionally, the driving parameter data may also include vehicle height.
[0020] Optionally, the position information, spacing and / or width of the lane marking...
Embodiment 2
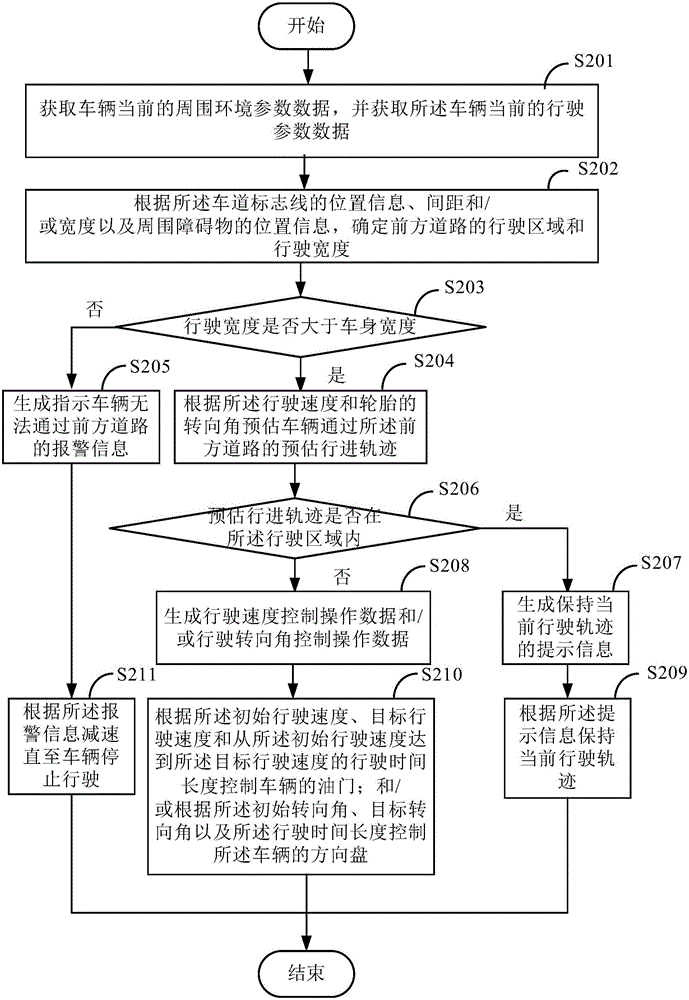
[0026] figure 2 It shows a schematic flowchart of the vehicle driving control method in the second embodiment of the present invention. On the basis of the first embodiment, S201 in this embodiment is the same as S110 in the first embodiment, and S202 to S208 in this embodiment are used to execute S120 in the first embodiment, and S209 to S211 are used to execute S130 in the first embodiment.
[0027] In S201, the current surrounding environment parameter data of the vehicle is obtained, and the current driving parameter data of the vehicle is obtained, and then S202 is executed.
[0028] In S202, determine the driving area and driving width of the road ahead according to the position information, spacing and / or width of the lane markings and the position information of surrounding obstacles, and then go to S203.
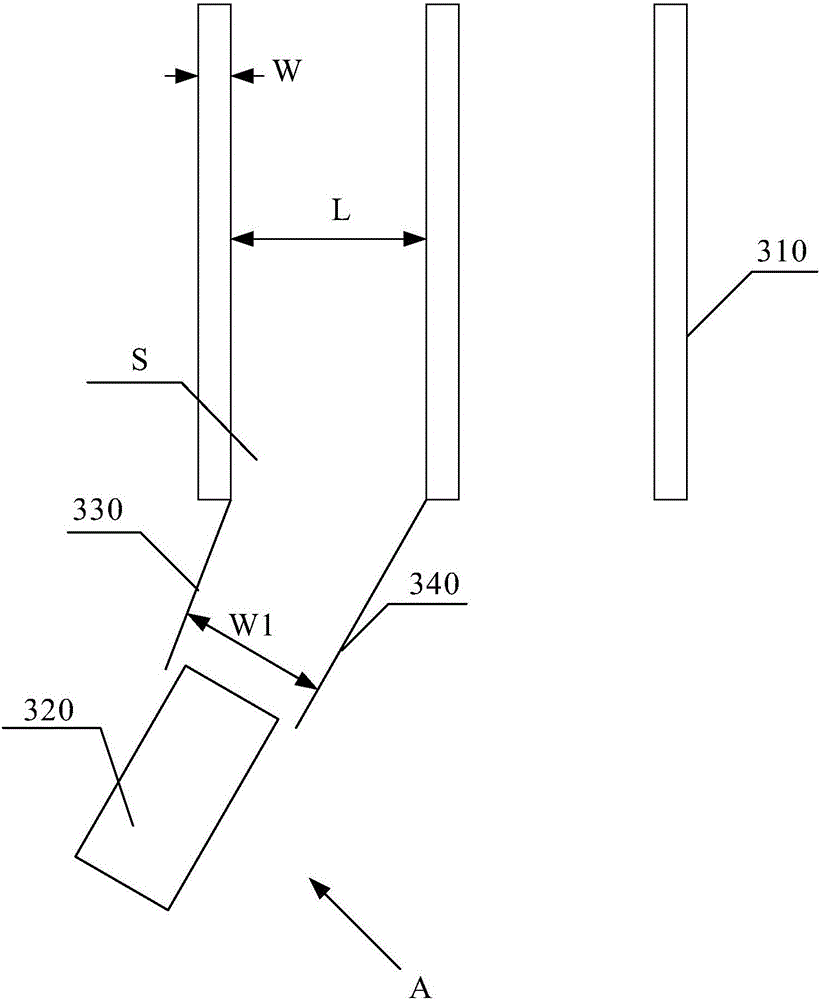
[0029] image 3 A schematic diagram showing the distribution of lane marking lines in Embodiment 2 of the present invention, Figure 4 A schematic diagram of th...
Embodiment 3
[0046] Figure 5 A schematic structural diagram of a vehicle travel control device in Embodiment 3 of the present invention is shown, and the vehicle travel control device in this embodiment is used to execute the vehicle travel control methods in Embodiment 1 and Embodiment 2. see Figure 5 , the vehicle travel control device includes a parameter acquisition module 510 , a control data generation module 520 and a control module 530 .
[0047] The parameter acquiring module 510 is configured to acquire the current surrounding environment parameter data of the vehicle, and acquire the current driving parameter data of the vehicle.
[0048] A control data generating module 520, configured to generate driving control operation data according to the surrounding environment parameter data and the driving parameter data.
[0049] The control module 530 is configured to control the traveling trajectory of the vehicle according to the driving control operation data, and / or output th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com