Auto-disturbance-rejection controller design based on finite-time extended-state observer
An active disturbance rejection controller and extended state observation technology, applied in adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] In order to make the purpose of the present invention, technical solutions and advantages clearer, the present invention will be further described from several aspects such as the establishment of the extended state observer, the design principle, and the solution method, and the following specific design methods are used to explain the present invention. But it is not limited to the present invention.
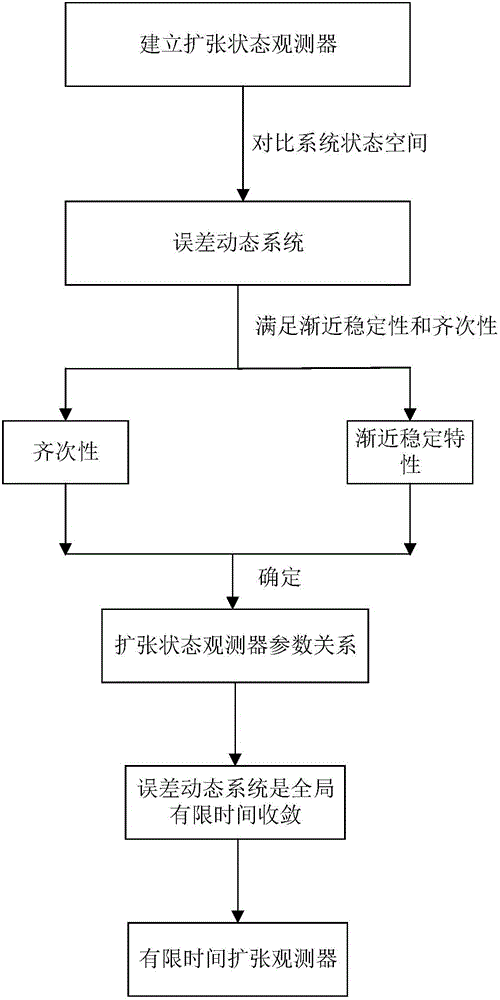
[0032] The design method of ADRC controller based on finite time extended state observer, the specific steps are as follows:
[0033] 1) Establish a third-order finite-time extended state observer:
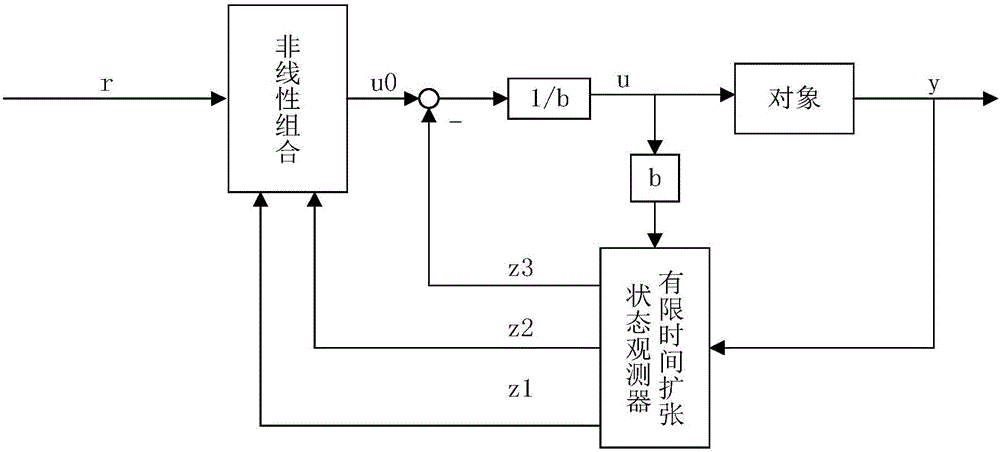
[0034] Consider any single-input single-output system can be written as follows:
[0035] the y (n) (t)=f(y (n-1) ,...,y,w,t)+bu
[0036] Where y is the controlled output, u is the control input, t is the time, b is the influence of the control input on the output, f(y (n-1) ,...,y,w,t) contains the internal uncertainty of the system and the external disturbance w, whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



