

Heterogeneous multi-unmanned aerial vehicle system cooperative reconnaissance task self-organization method
A multi-UAV, UAV technology, applied in control/regulation systems, unmanned aerial vehicles, motor vehicles, etc., can solve the problems of rare autonomous planning methods, poor adaptability to dynamic environments, etc., and achieve a good environment. Adaptability and task adaptability, the effect of good adaptation to online requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
[0050] First make the following instructions:
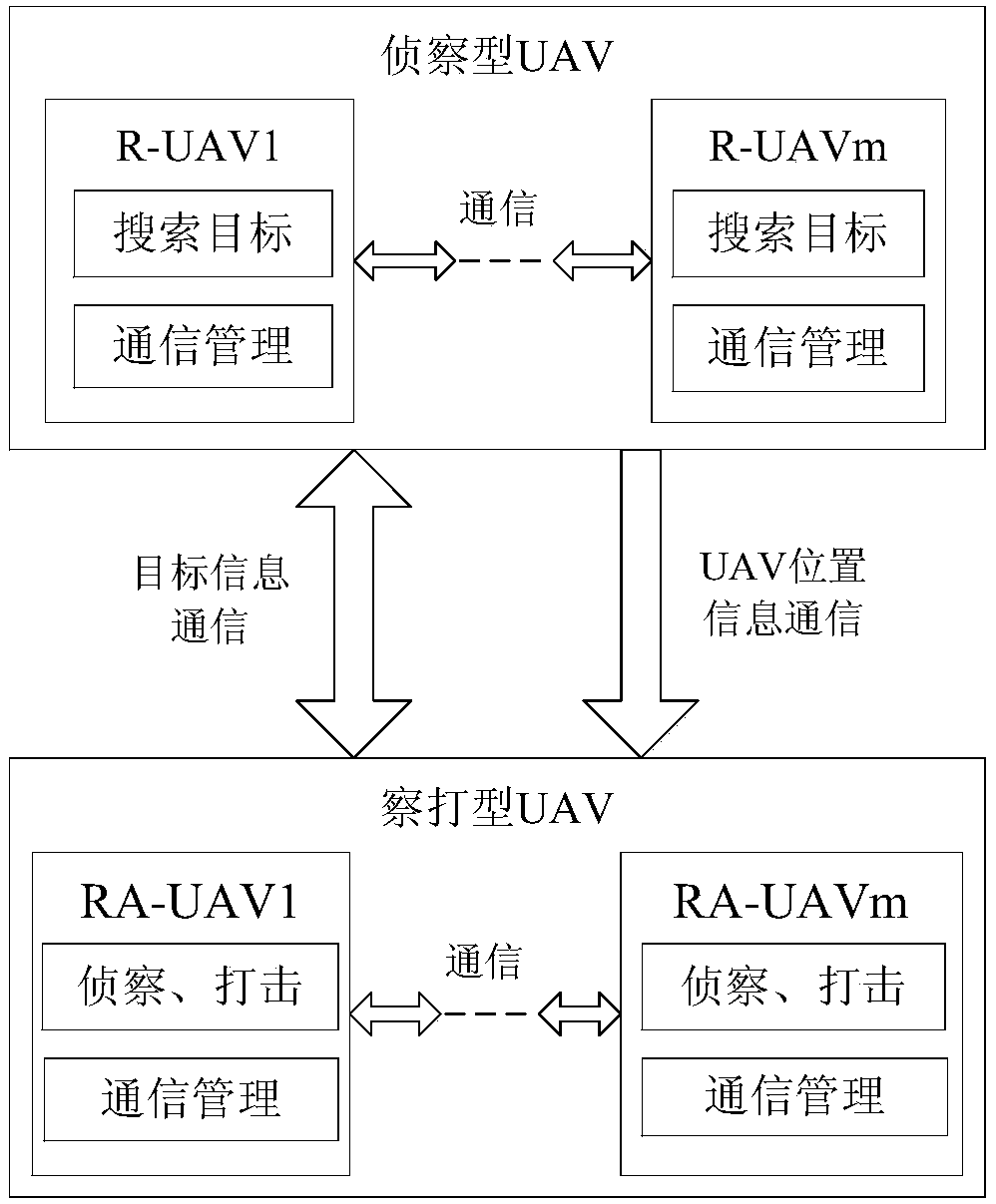
[0051] 1. Isomorphic reconnaissance UAV system: The isomorphic reconnaissance UAV system described in the present invention refers to a system composed of multiple reconnaissance UAVs with the same parameters.
[0052] 2. Isomorphic reconnaissance and strike UAV system: The isomorphic reconnaissance and strike UAV system described in the present invention refers to a system composed of multiple reconnaissance and strike UAVs with the same parameters. The aircraft is equipped with detection sensors and strike weapons, and has reconnaissance and strike functions.
[0053] 3. Heterogeneous multi-UAV system: The heterogeneous multi-UAV system described in the present invention refers to a multi-UAV system composed of the above two systems mixed together.
[0054] The self-organization method of the heterogen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More