

A claw-tumbling stair-climbing robot and its climbing method
A robot and claw technology, applied in the field of intelligent robots, can solve problems such as low efficiency and complex structure, and achieve the effect of increasing stability and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
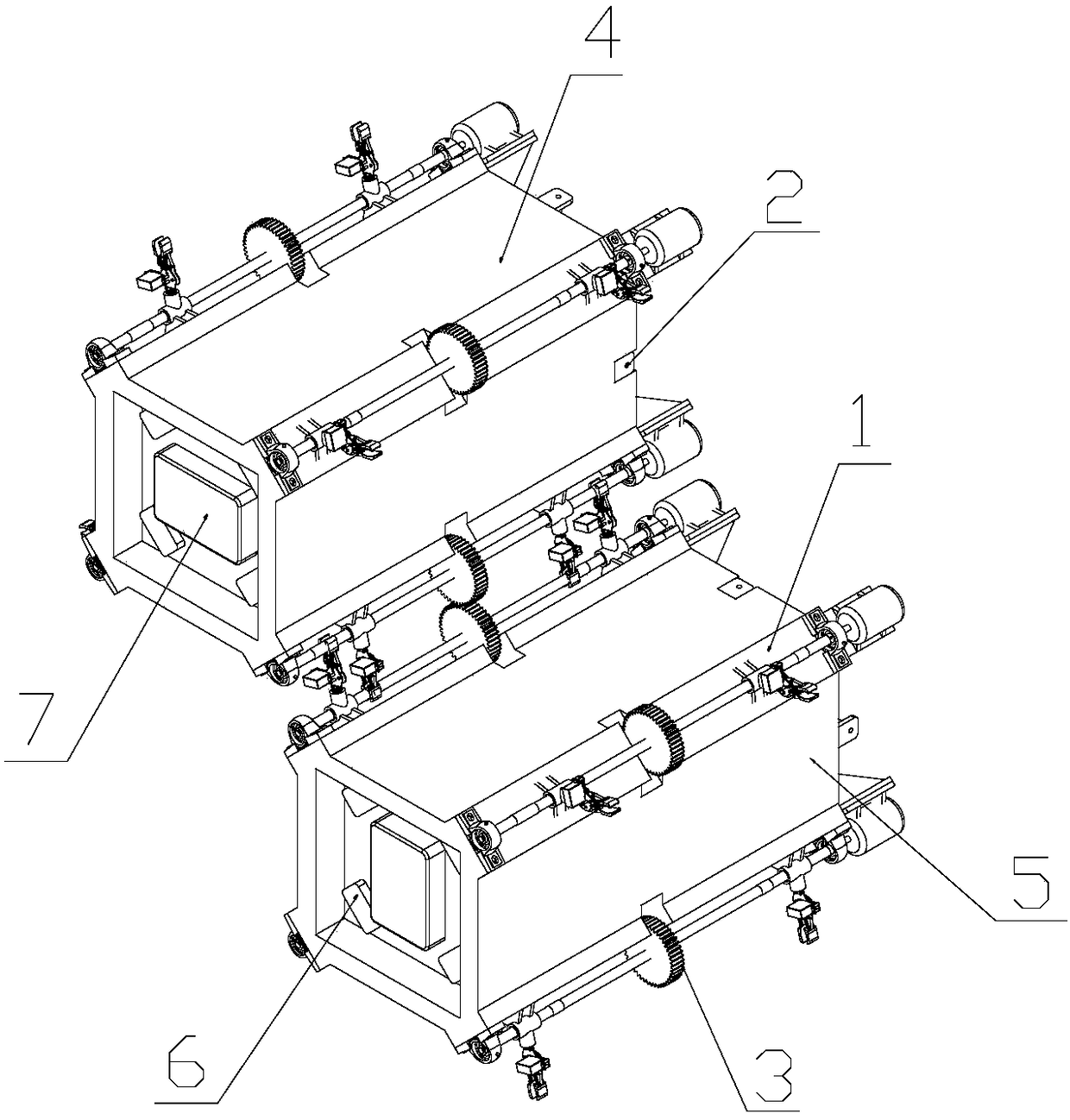
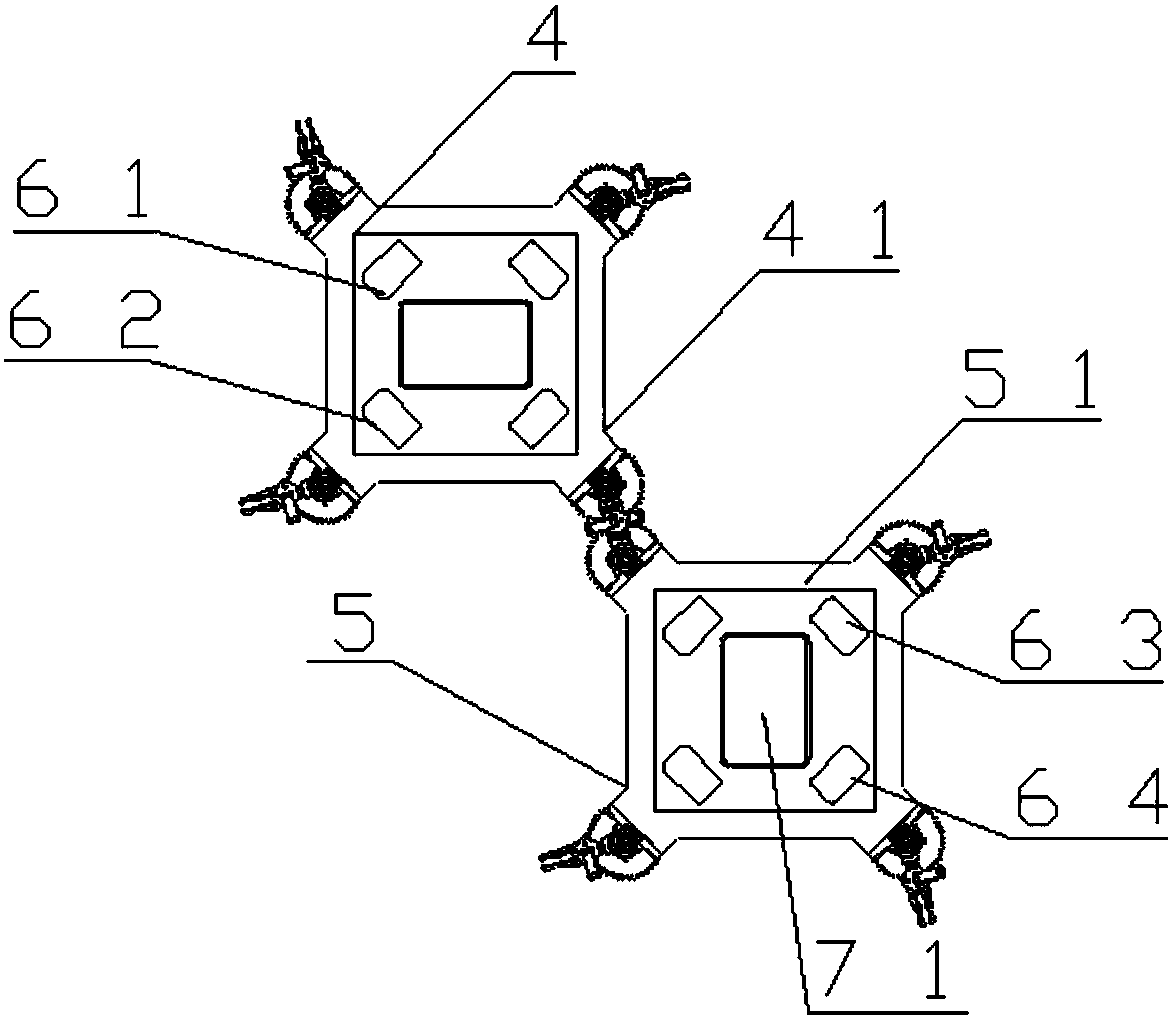
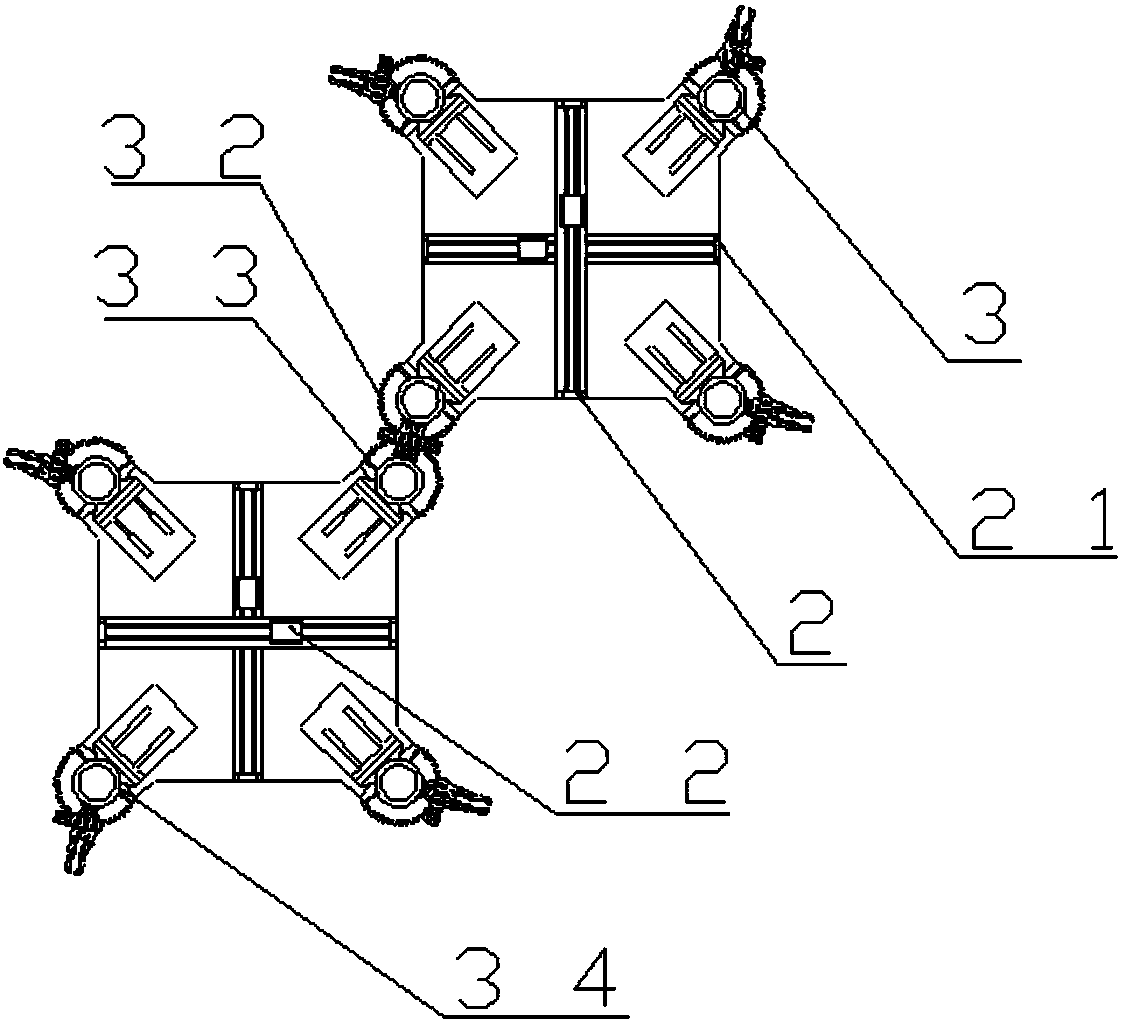
[0033] Such as figure 1As shown, a claw rolling stair climbing robot includes: claw mechanism 1, gravity adjustment mechanism 2, rolling mechanism 3, climbing main body 4, climbing auxiliary body 5, control mechanism 6, and power supply 7. The claw The mechanism 1 is provided with multiple groups, and the claw mechanism 1 is fixedly installed on the edge of the climbing main body 4 and the climbing auxiliary body 5 respectively, and the climbing main body 4 and the climbing auxiliary body 5 are connected through the claw mechanism 1, The gravity adjustment mechanism 2 is distributed on the side of the climbing main body 4 and the climbing auxiliary body 5, the rolling mechanism 3 is fixed on the claw mechanism 1, and the control mechanism 6 and power supply 7 are both arranged on the climbing body 4. The inside of main body 4 and climbing auxiliary body 5.
[0034] Such as Figure 1-6 As shown, the claw mechanism 1 includes: claw horizontal shaft 11, claw bearing 12, claw ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More