

A Composite Layered Anti-jamming Attitude Stabilization Control Method for Assembled Spacecraft
A stable control method and composite layered technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as the reduction of control accuracy, and achieve the effect of high reliability and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
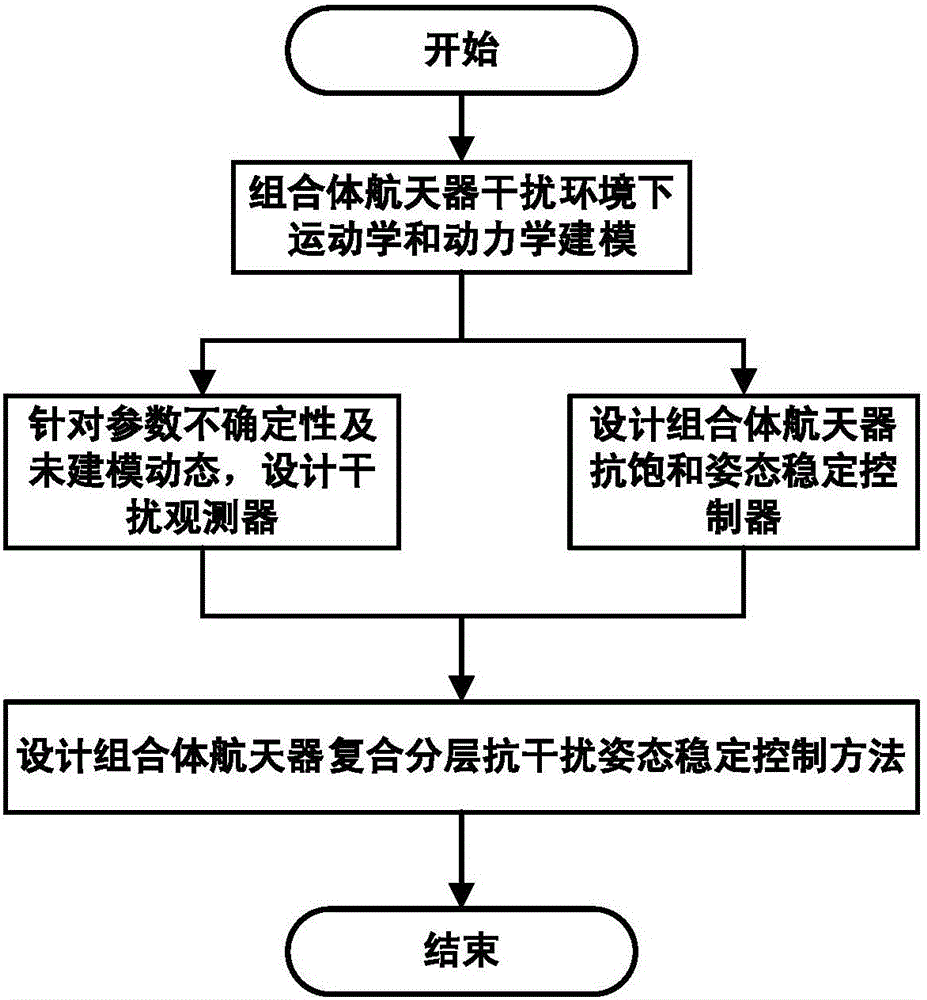
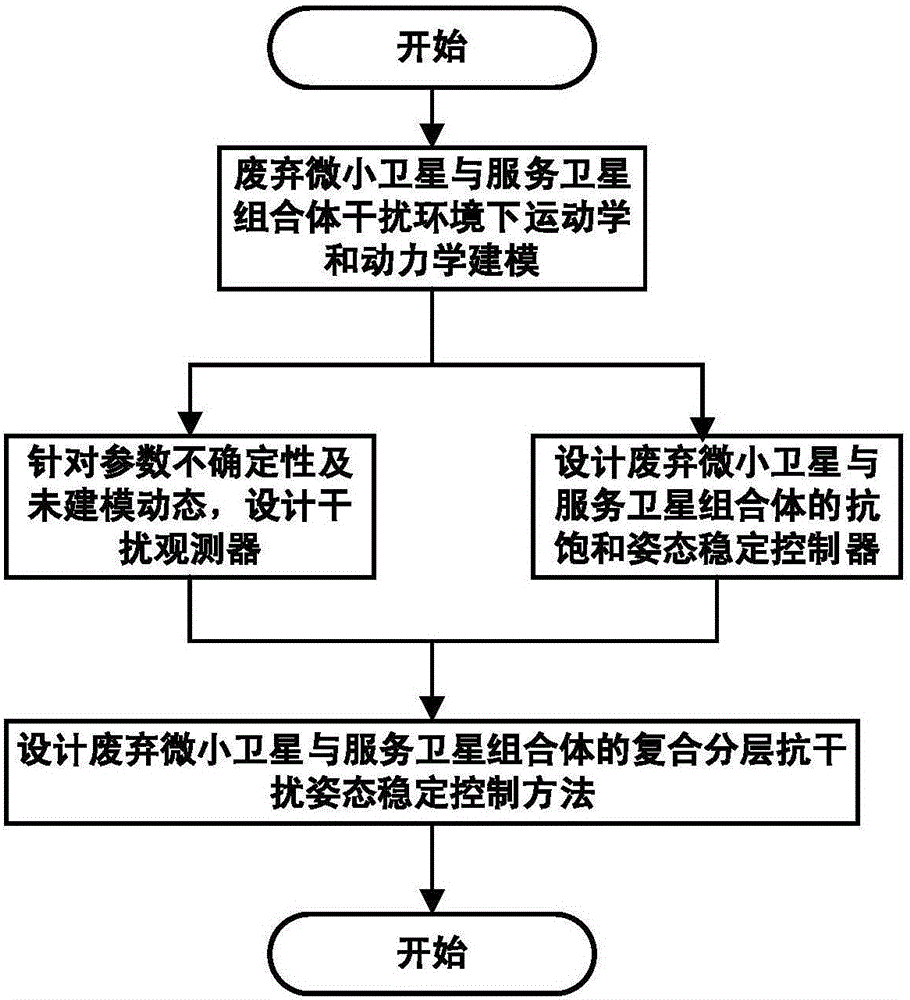
[0027] Such as figure 2 As shown, the specific implementation steps of the present invention are as follows (the following is an example to illustrate the specific implementation of the method by taking the composite spacecraft formed by the abandoned micro-satellite and service satellite in space):
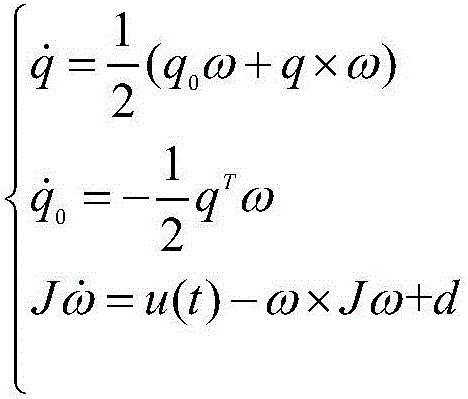
[0028] The first step is to establish the kinematics and dynamics model of the abandoned satellite and service satellite assembly under the environment of multi-source interference:
[0029]
[0030] Among them, q and q 0 are the attitude four-element vector and scalar of the abandoned microsatellite and service satellite assembly respectively, and the initial value is q=[0.4,-0.4,0.2] T and q 0 =0.8, is the moment of inertia of the abandoned microsatellite and service satellite assembly, ω is the attitude angular velocity of the abandoned microsatellite and service satellite assembly, the initial value is ω=[1,-1,0.5]rad / s, u(t) It is the three-axis attitude stabilizati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More