

Robot anti-collision control system
A control system and robot technology, applied in the field of robotics, can solve problems such as robot damage, system errors, and robots touching surrounding objects, and achieve the effect of preventing serious damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following is attached figure 1 The present invention is further described in detail.
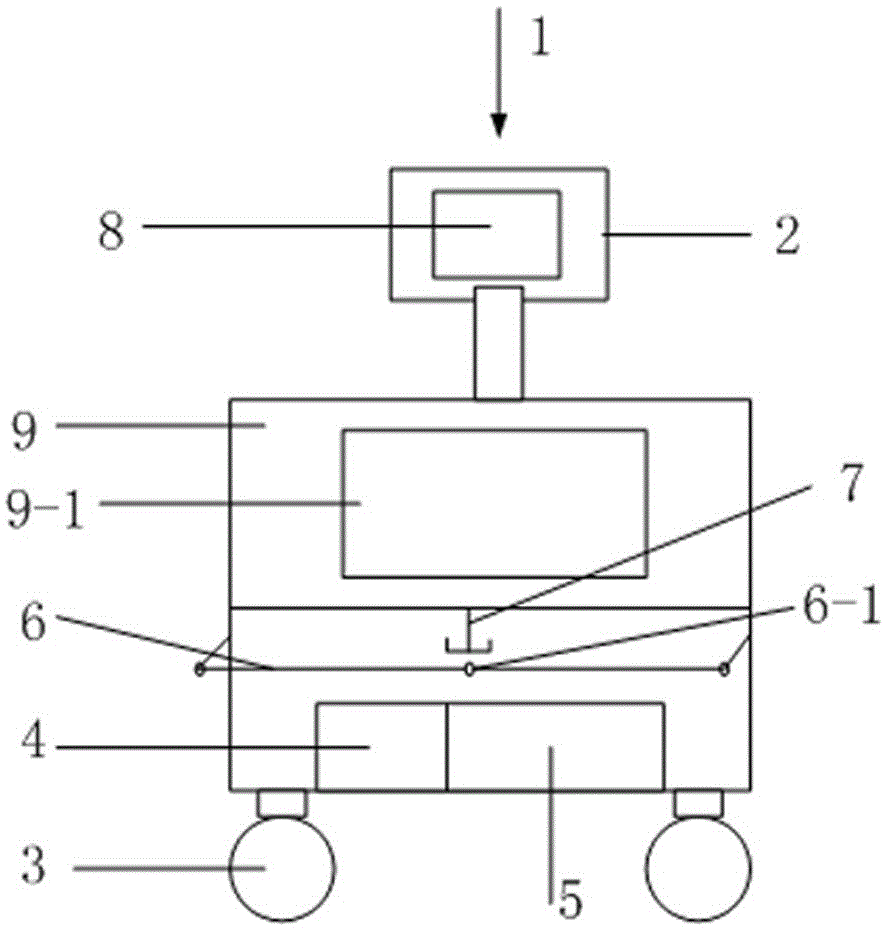
[0018] Such as figure 1 A robot anti-collision control system is shown, which includes: a driving device 4 arranged on a robot 1, a battery 5 that provides power for the driving device 4, a walking actuator, an anti-collision steel beam 6, and an emergency stop control device 7. Alarm device 8 and main control device 9;
[0019] The anti-collision steel beam 6 is an annular strip structure formed by connecting multiple parts with hinges 6-1. The anti-collision steel beam 6 is arranged on the surface of the robot 1, and the emergency stop control device 7 is arranged on the Describe the inside of the anti-collision steel beam 6;
[0020] The main control device 9 is connected with the driving device 4, the walking actuator, the emergency stop control device 7, and the alarm device 8. The main control device 9 includes: a signal receiving and transmitting module 9-1, which receiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More