

Multi-connection-rod jumping mechanism
A multi-link and link technology, applied in the field of jumping mechanism, can solve the problems of slow movement, difficult to climb smoothly, and many degrees of freedom.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
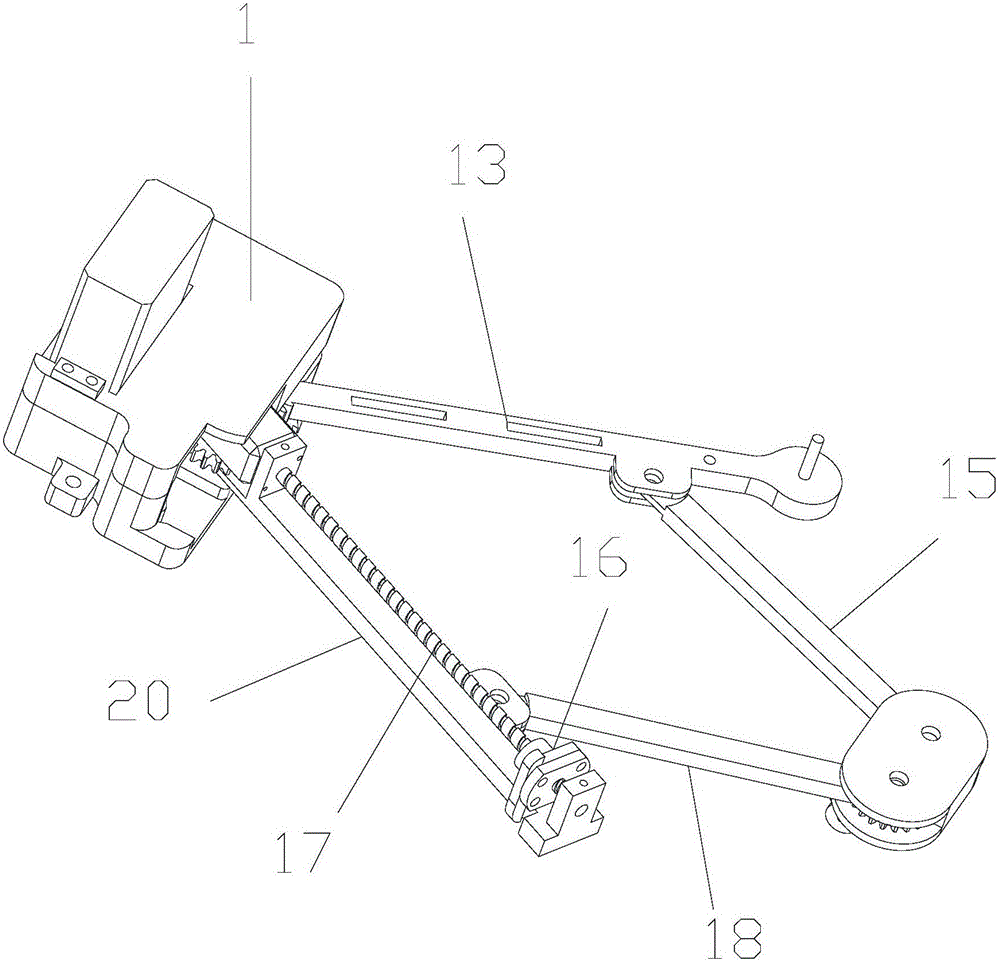
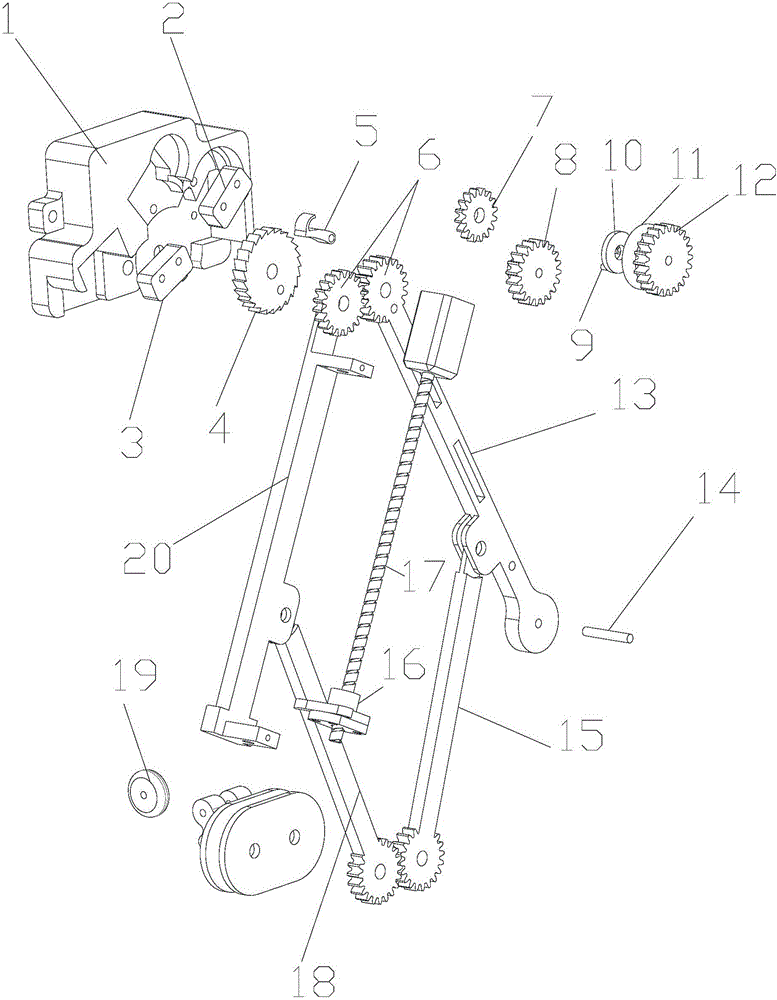
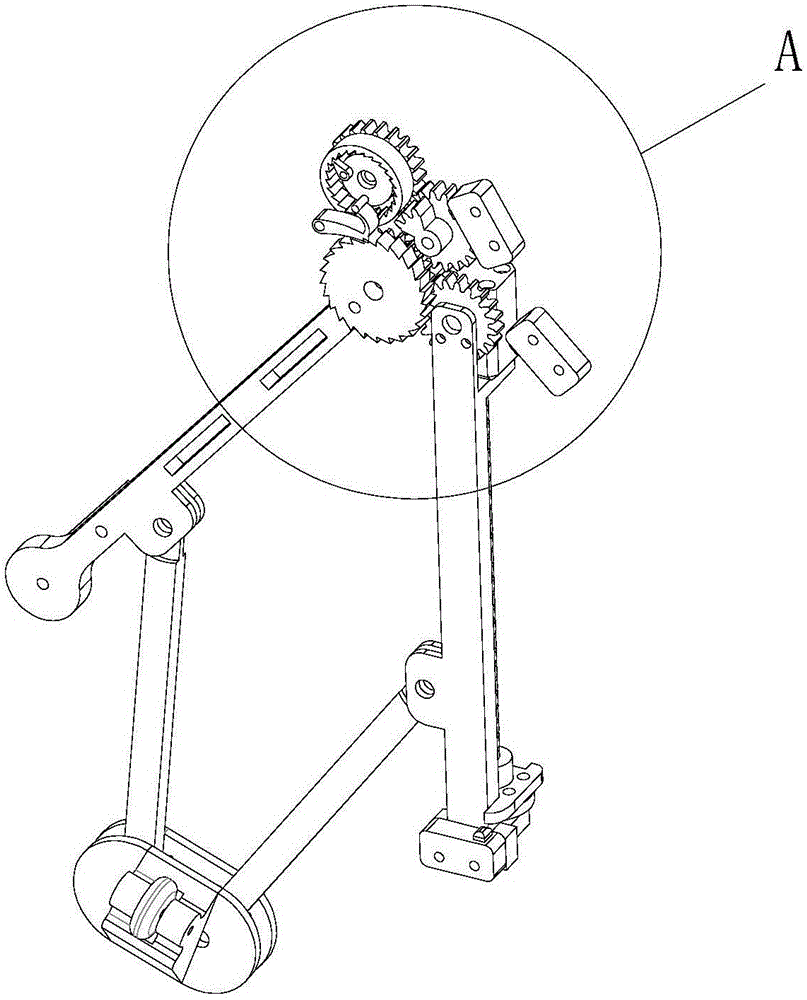
[0021] figure 1 It is a structural schematic diagram of the present invention, as shown in the figure, the multi-link jumping mechanism of this embodiment includes a frame 1, a multi-link mechanism, an elastic element, an energy storage assembly and a trigger device; the energy storage assembly is used to The elastic element is stretched in a non-reverse manner, and the trigger device can release the anti-reverse effect of the energy storage component to make the elastic element rebound. The resilience of the elastic element is used to drive the multi-link mechanism to deform instantaneously and Utilize the reaction force between the connecting rod and the ground during deformation to push the multi-link mechanism to move upwards to realize jumping; the elastic element is connected between the two connecting rods in the multi-link mechanism, and the energy storage component drives the two connecting rods to rotate relative to each other to make the elastic element Stretch to s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More