

Vehicle tracking method in fusion with feature matching and optical flow method
A fusion feature and vehicle tracking technology, which is applied in the field of vehicle tracking by fusion feature matching and optical flow method, can solve the problems of tracking system instability, offset error of related information parameters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
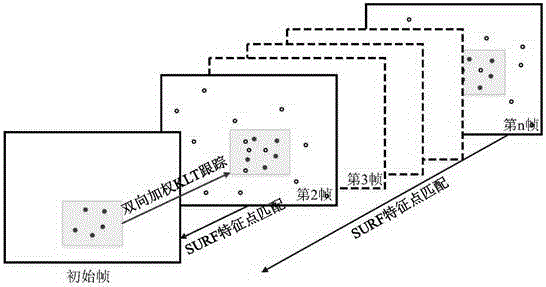
[0050] see Figure 1~4 , a vehicle tracking method that combines feature matching and optical flow, including the following steps:
[0051] Step 1, use a rectangular frame to mark the vehicle target to be tracked in the initial frame, and use the SURF feature extraction algorithm to extract the feature points in the rectangular frame, expressed as a feature point set R;
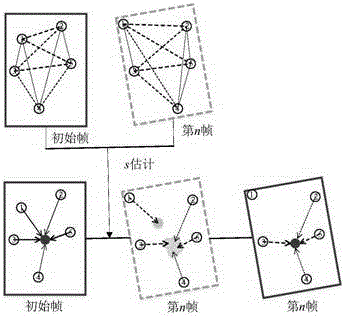
[0052] Step 2, extract the coordinate O of the center position of the rectangular frame in step 1, and:
[0053] Calculate the relative distance (r ij ) i≠j ;
[0054] According to the formula (1.2), calculate the relative distance h(p i ,O);
[0055] Calculate the relative angle α between any two feature points in the point set R in step 1 according to formula (1.3), where 180°>α≥0°; figure 1 As shown, the rotation angle of α is counterclockwise;
[0056] According to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More