

A crawler-type magnetic adsorption cable detection robot
A magnetic adsorption and robot technology, which is applied to bridge parts, bridges, buildings, etc., can solve the problems of not being able to adapt to the cable, the braking force is stuck, etc., and achieve the ability to improve the ability to prevent derailment, reduce the installation time, and improve the ability to overcome obstacles. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
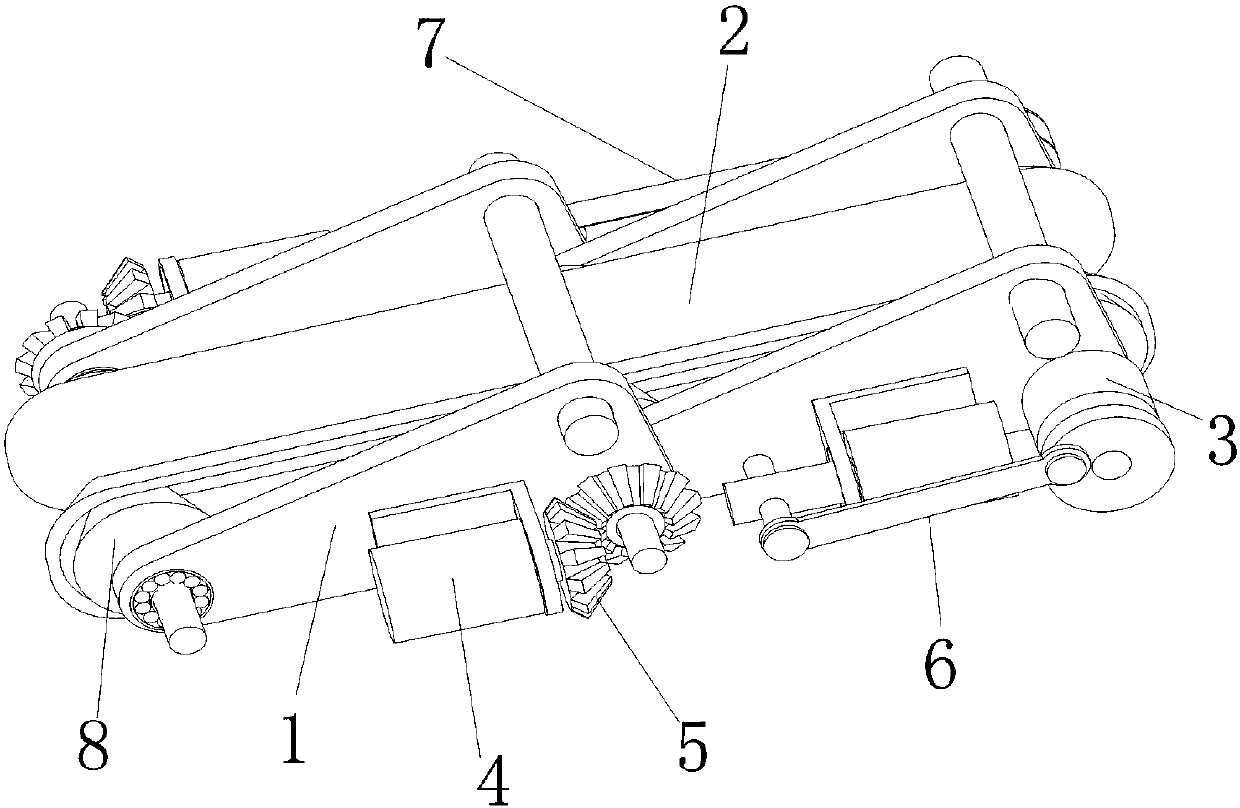
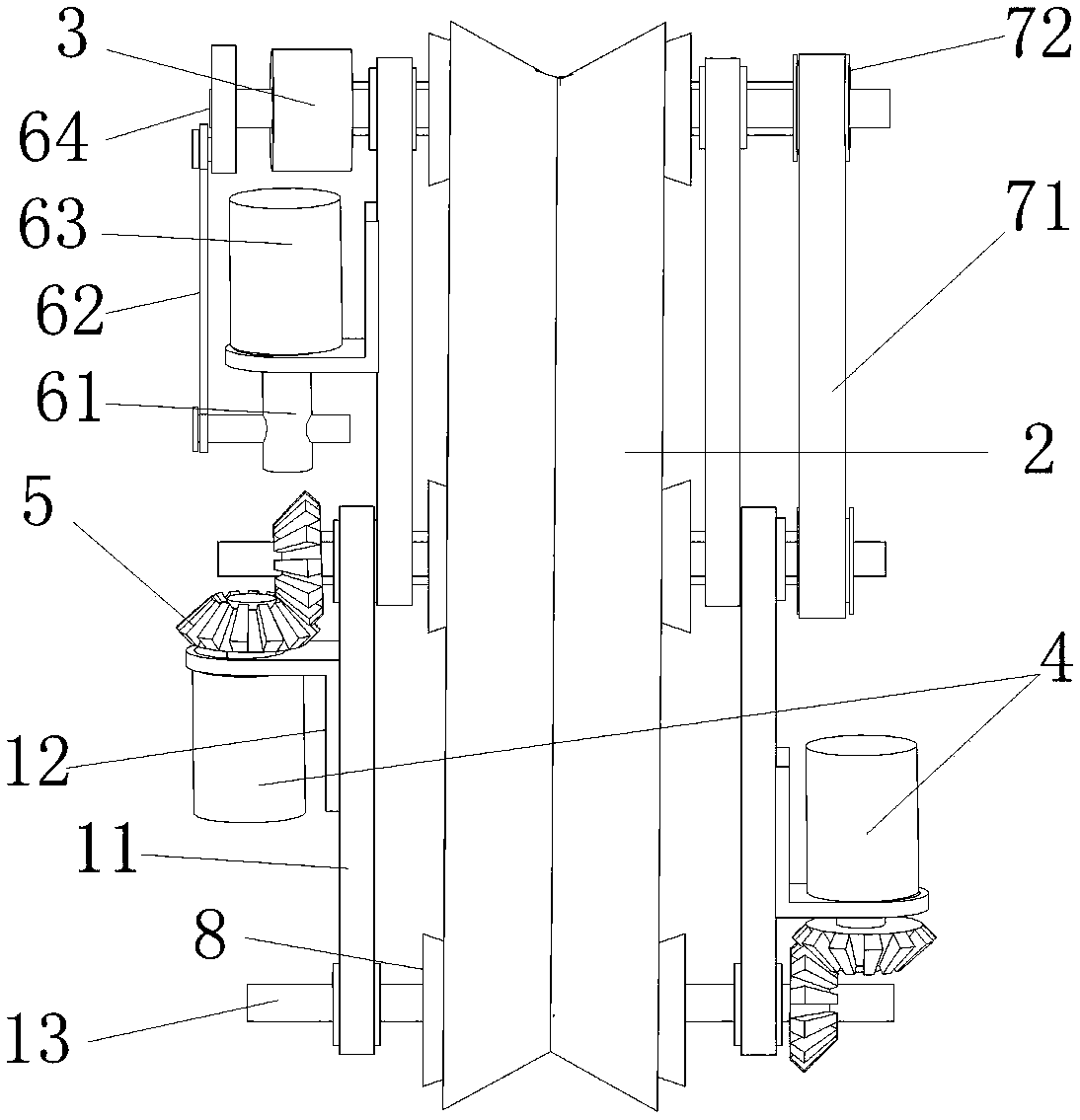
[0046] Such as figure 1 and figure 2 As shown, a crawler-type magnetic adsorption cable detection robot includes a frame 1 , a V-shaped rubber track 2 , a clutch 3 , a descending speed limiting device 6 and at least two V-shaped road wheels 8 .
[0047] The number of V-shaped road wheels 8 is set as required, preferably three, but also multiple. Among them, at least one V-shaped road wheel is a driving wheel, but two or more of them can also be driving wheels, which can be set according to the needs of climbing force.
[0048] In this application, three V-shaped road wheels are used as an example, and two of them are driving wheels and one V-shaped road wheel is a driven wheel.
[0049] Each driving wheel is connected with a driving device, and the driving device of the driving wheel is preferably a bevel gear 5 and a mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More