

Touch measurement sensor based on visual sense
A technology for measuring sensors and tactile sensations, applied in the direction of measuring force, measuring devices, instruments, etc., can solve problems such as noise, sensitive to temperature changes, and inability to detect shear force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
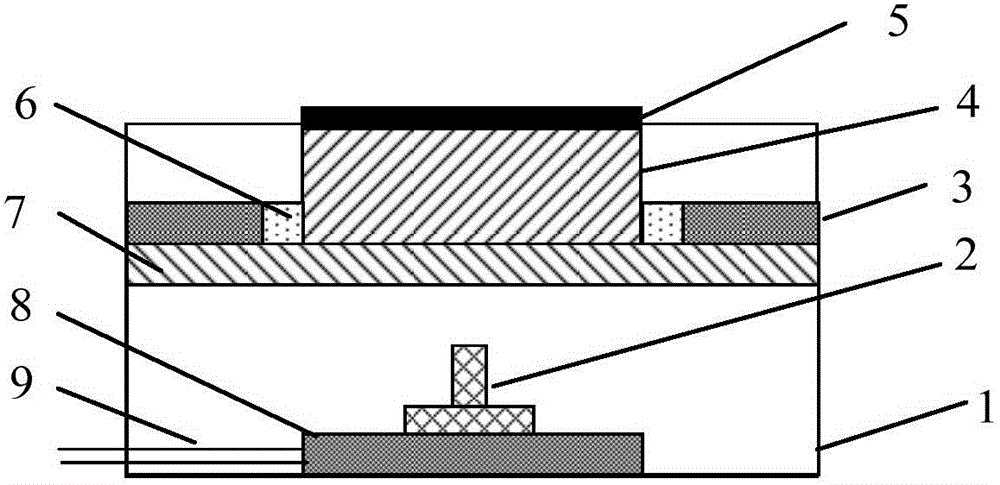
[0013] The vision-based tactile sensor proposed by the present invention has a structural schematic diagram as figure 1 As shown, it includes: shell 1, communication interface conversion circuit 8, camera 2, light-transmitting support layer 7, light-emitting diode 6, light-emitting diode excitation circuit 3, elastic body with marking 4 and black rubber 5. The communication interface conversion circuit 8 is fixed on the bottom of the housing 1, and the communication interface conversion circuit 8 outputs signals through signal lines. On the circuit board of the fixed communication interface conversion circuit 8 of the camera 2. The light-transmitting support layer 7 is relatively fixed to the shell 1, and the center of the upper part of the light-transmitting support layer 7 is fixed with a marked elastic body 4. Marking points are printed on the upper surface of the marked elastic body, and the two sides of the marked elastic body are respectively provided with The light emi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More