

Unmanned plane automatic landing guiding method based on optical flow
A technology for automatic landing and unmanned aerial vehicles, which is applied in non-electric variable control, target-seeking control, instruments, etc., and can solve the problems of sound source time delay method environmental interference, unmanned aerial vehicle crashes, missing and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
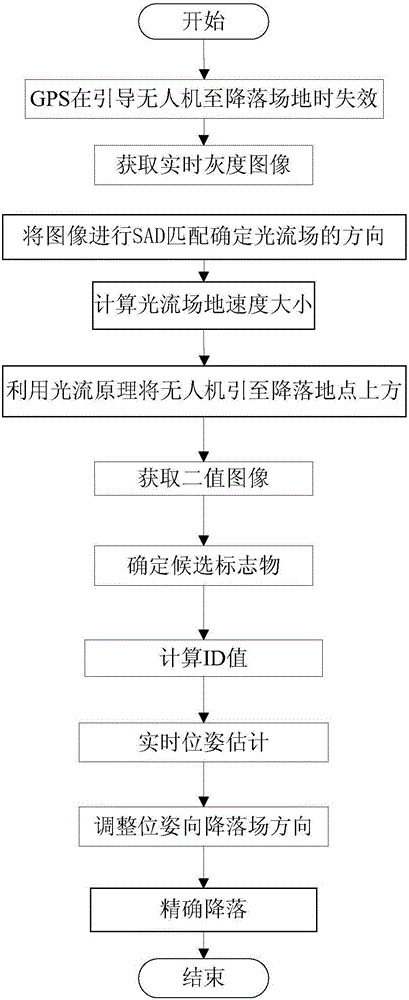
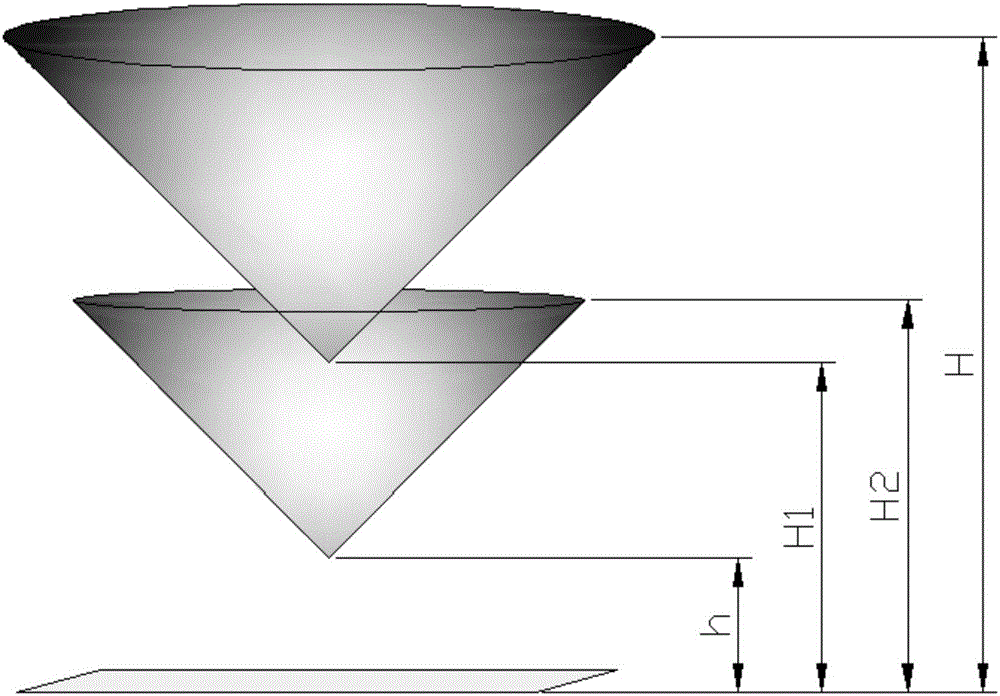
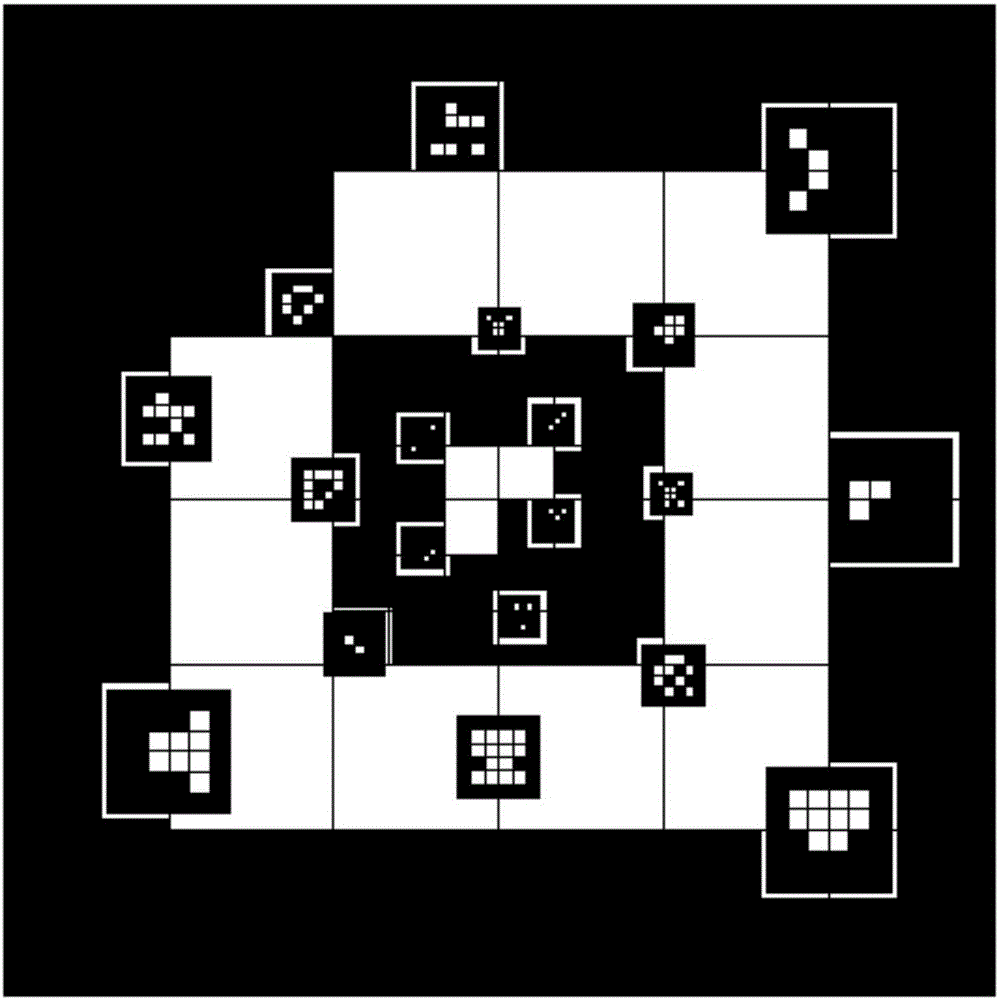
[0074] Such as figure 1 As shown, it shows that the present invention leads the UAV to the approximate range above the landing site, the GPS fails, uses the optical flow module to guide the UAV to move to the approximate range above the landing site, and the precise process of the drone's autonomous landing. Firstly, the GPS and optical flow modules are used for navigation and positioning to guide the drone to an approximate position a few meters above the landing site. The present invention takes a 6*6 (the landing site can be divided into a square area composed of N*N identical grid areas, called N*N markers) two-dimensional code marker scheme as the landing site as an example.
[0075] When there is GPS, use GPS navigation to guide the drone to a few meter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More