

A voxelization method for point cloud data and a voxel occlusion clipping method
A point cloud data and voxelization technology, which is applied in image data processing, instruments, calculations, etc., can solve problems such as difficult network construction, difficult scene update, sensitive scene complexity, etc., and achieve the effect of reducing display difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
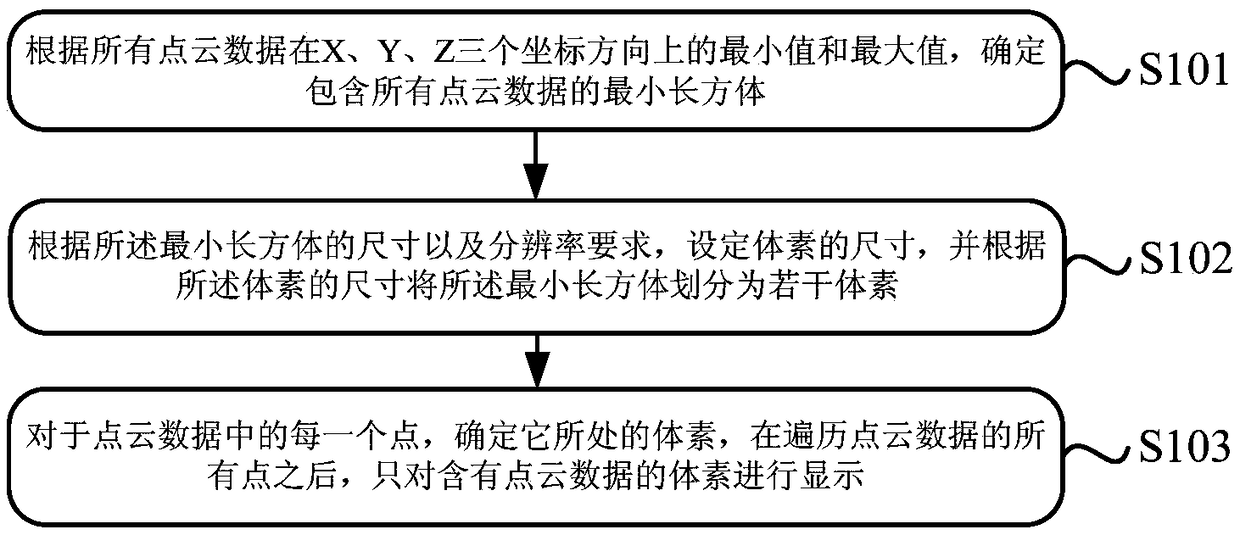
[0031] combine figure 2 , Embodiment 1 of the present invention provides a voxelization method for point cloud data, including:
[0032] Step S101: According to the minimum and maximum values of all point cloud data in the three coordinate directions of X, Y, and Z, determine the distribution range of point cloud data, that is, the smallest cuboid containing all point cloud data;
[0033] The minimum and maximum values of all point cloud data in the three coordinate directions of X, Y, and Z can be determined by comparison method, that is, x min and x max ,y min and y max ,z min and z max , where x min 、x max Respectively, the minimum and maximum values of all point cloud data in the X coordinate direction, y min 、y max are the minimum and maximum values of all point cloud data in the Y coordinate direction, z min ,z max are the minimum and maximum values of all point cloud data in the Z coordinate direction, respectively.
[0034] The size of the smalle...
Embodiment 2
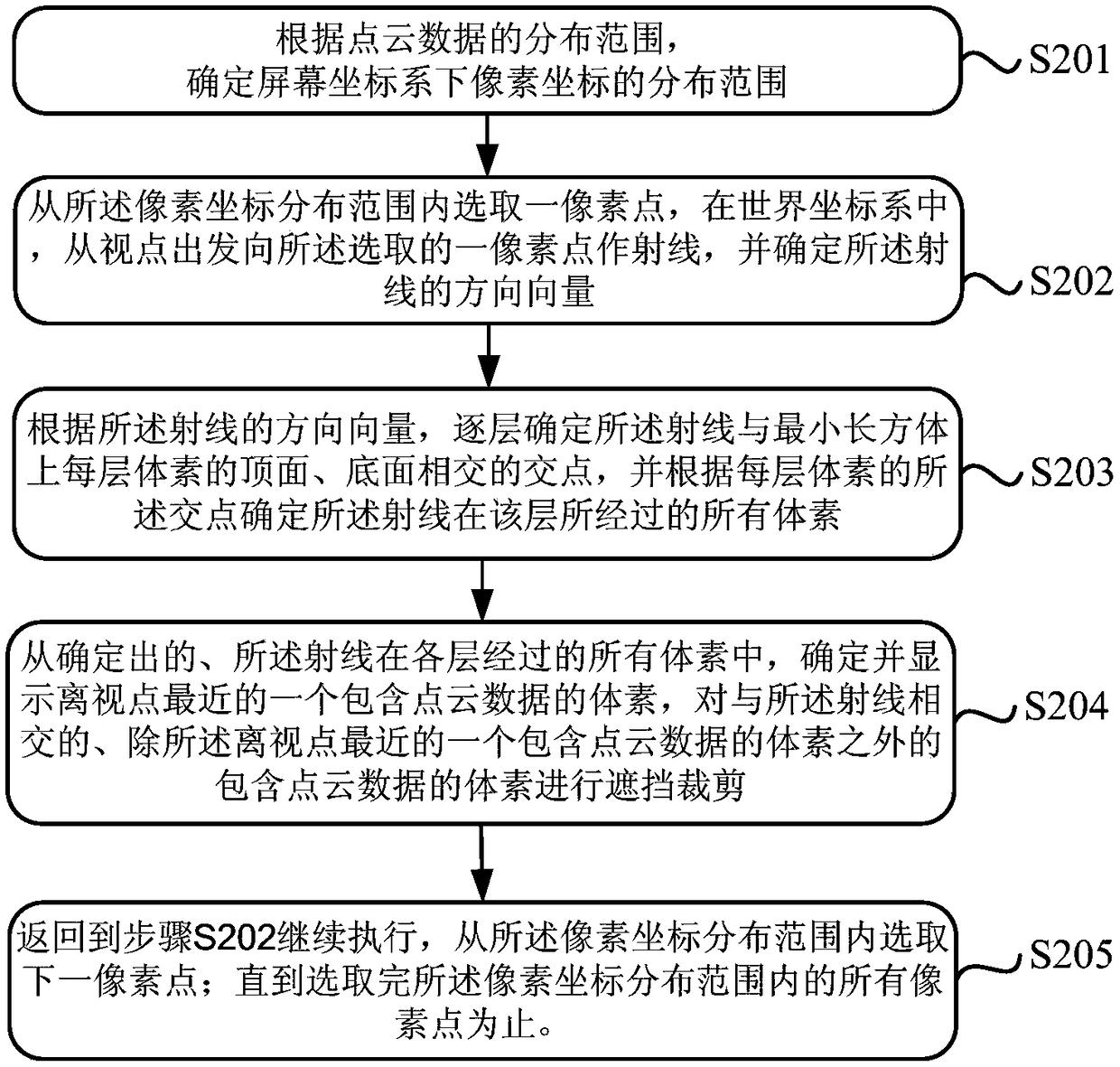
[0044] combine image 3 , Figure 4 with Figure 5 , Embodiment 2 of the present invention provides a voxel occlusion and clipping method based on the voxelization method described in Embodiment 1, including:
[0045] Step S201: According to the distribution range of the point cloud data (that is, according to the minimum value x of all point cloud data in the three coordinate directions of X, Y, and Z min 、y min ,z min and the maximum value x max 、y max ,z max The obtained smallest cuboid containing point cloud data), calculate (x min ,y min ,z min ) and (x max ,y max ,z max ) coordinates corresponding to the two points in the screen coordinate system, and determine the distribution range of the pixel coordinates, thereby reducing the number of rays made from the viewpoint to the pixel points within the pixel coordinate distribution range, and reducing the calculation amount of geometry intersection of rays and voxel surfaces.
[0046] Step S202: Select a pixel p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More