

Posture-adjustable and operable mobile robot
A mobile robot and attitude technology, applied in the field of mobile robots, can solve the problems of low attitude adjustment ability, poor movement ability of legged robots, complex movement control, etc., and achieve good attitude adjustment, good walking and operation, and control adjustment convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
[0025] A mobile robot capable of attitude adjustment and operation according to an embodiment of the present invention will be described in detail below with reference to the accompanying drawings.
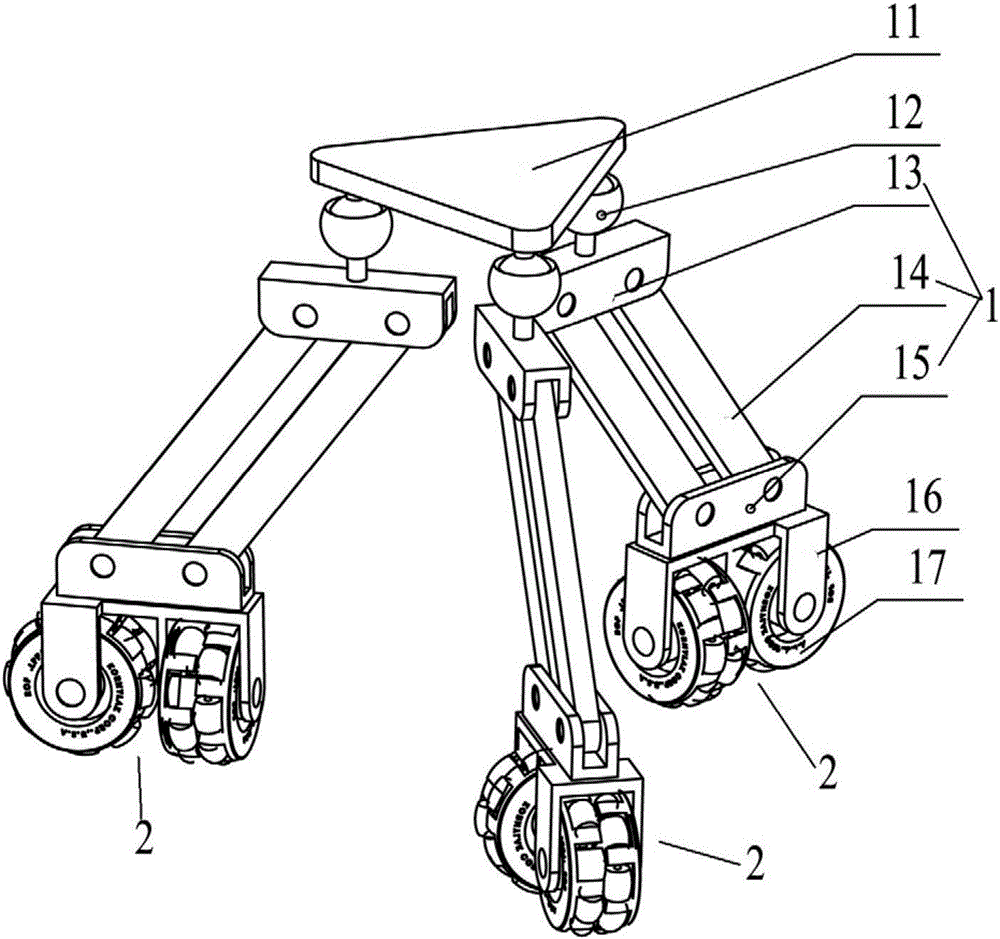
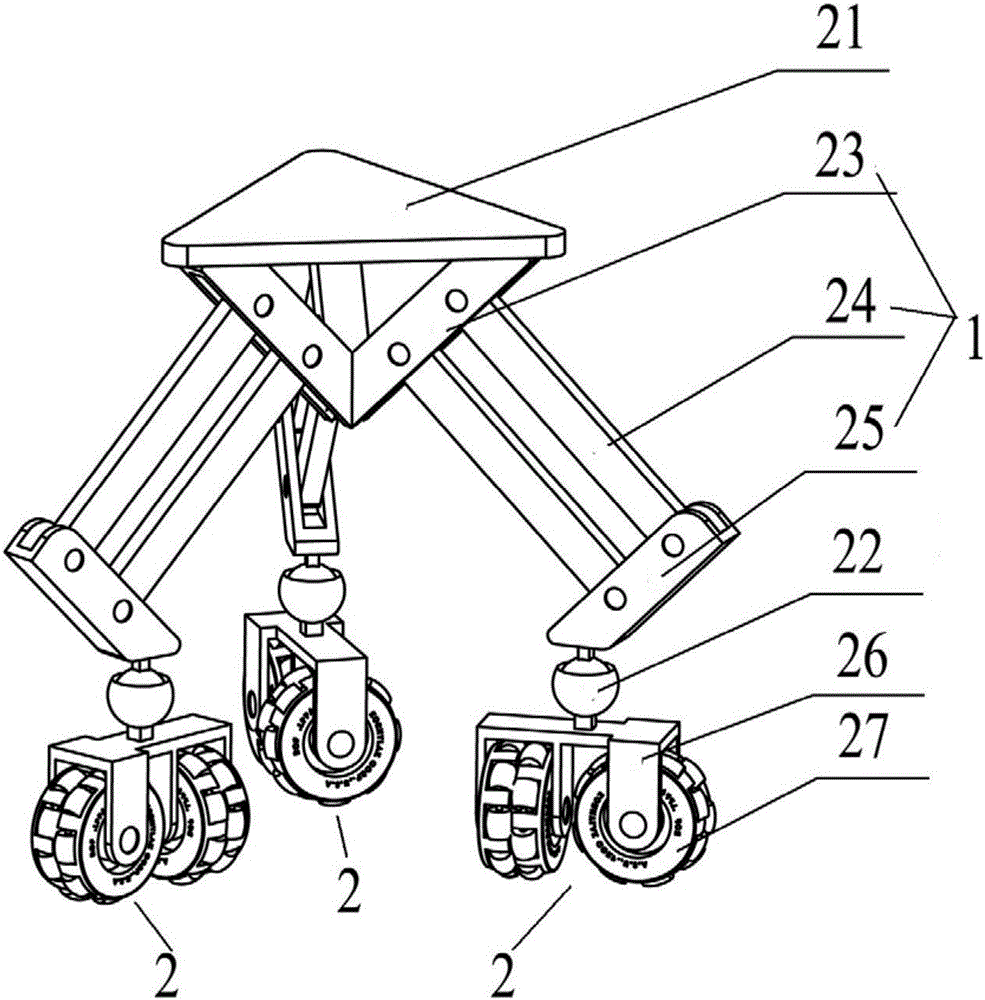
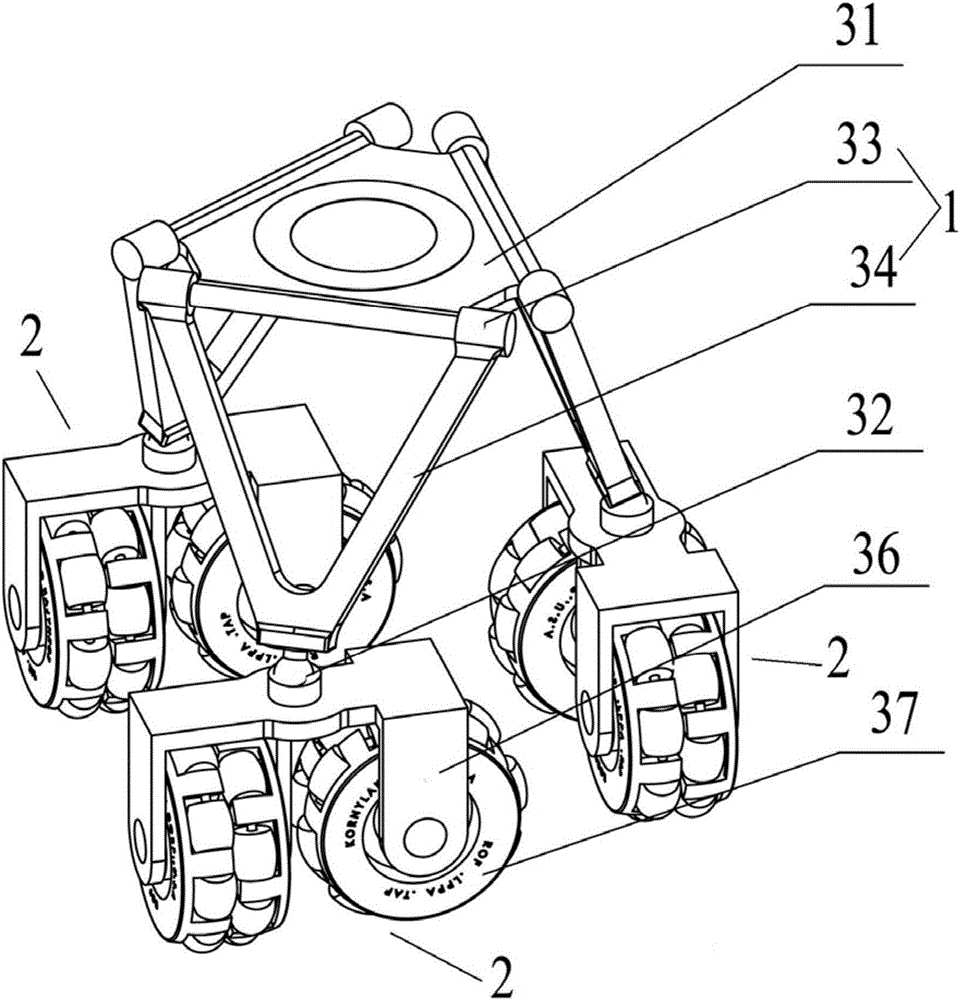
[0026] refer to Figure 1 to Figure 5 As shown, the posture-adjustable and operable mobile robot according to the embodiment of the present invention includes an installation platform 11 (21, 31), three articulation assemblies 1, three driving wheels 2 and a controller.
[0027] Three movable connection assemblies 1 are distributed at intervals along the circumference of the installation platform 11 (21, 31), and the upper end of each movable connection assembly 1 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More