

Reduction exoskeleton joint and exoskeleton power assisting device thereof
A technology of exoskeleton and joints, which is applied in the direction of equipment to help people walk, physical therapy, etc., and can solve the problems of reducing passive exoskeletons
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
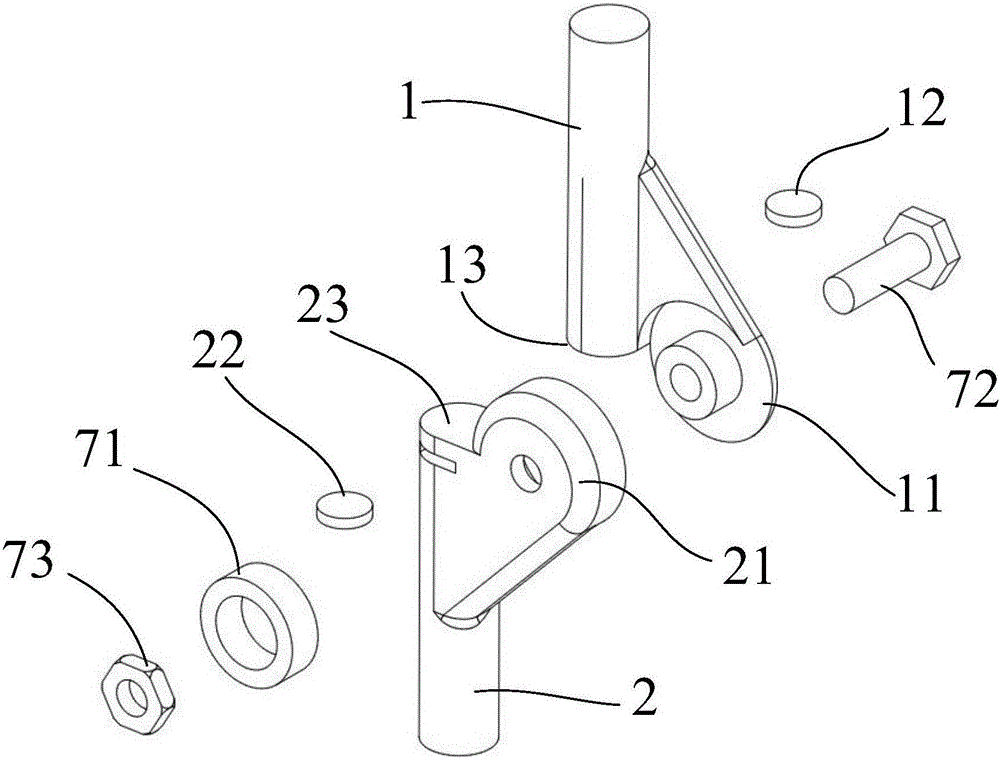
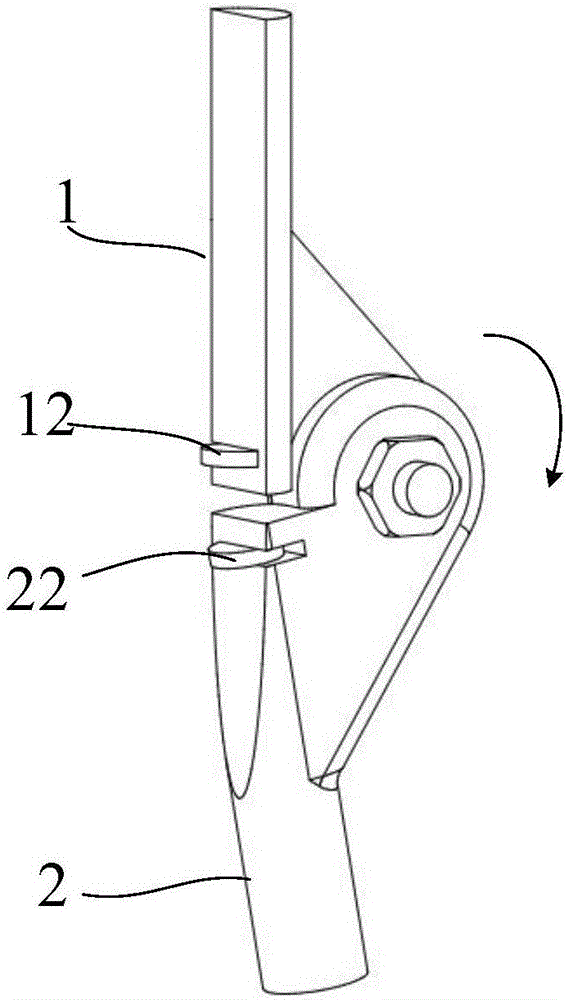
[0130] Such as figure 1 and figure 2 As shown, a resetting exoskeleton joint includes a first limb 1 and a second limb 2. In this example, the knee joint is taken as an example for illustration, wherein the first limb 1 corresponds to the upper joint, the second limb 2 corresponds to the lower joint, and the second limb 2 corresponds to the lower joint. The joint heads 11 and 21 of the first limb 1 and the second limb 2 are rotatably connected by bearings 71, bolts 72 and nuts 73. In order to make the first limb 1 and the second limb 2 reset quickly when they tend to stand upright, this example A resetting mechanism is arranged between the first limb 1 and the second limb 2 . In this example, a magnet attraction mechanism is used to reset, that is, a magnet 12 is set on the first limb 1, and an attraction element 22 that attracts the magnet 12 is arranged on the second limb 2 for suction. The attraction element 22 can be a steel column, iron column or magnet. The magnet 12...
Embodiment 2
[0132] Such as image 3 and Figure 4 As shown, in this example, the joint heads 11, 21 of the first limb 1 and the second limb 2 are rotationally connected by bearings 71, bolts 72, and nuts 73. In order to make the first limb 1 and the second limb 2 tend to stand upright, Can reset quickly, in this example, a resetting mechanism is provided between the first limb 1 and the second limb 2, which includes a spring 31 as a pressing mechanism, and a matching wedge 32 and wedge groove 33, and the spring 31 from The radial direction of the joint exerts elastic force on the wedge 32, wherein the spring 31 is vertically installed in the groove provided by the second limb 2, and the wedge groove 33 is opened on the arc-shaped outward expansion surface of the joint head 11 of the first limb 1, and the wedge 32 It is located above the spring 31 and is pressed tightly in the wedge groove 33. Through the inclined mating surface of the wedge groove 33 and the wedge block 32, the vertical ...
Embodiment 3
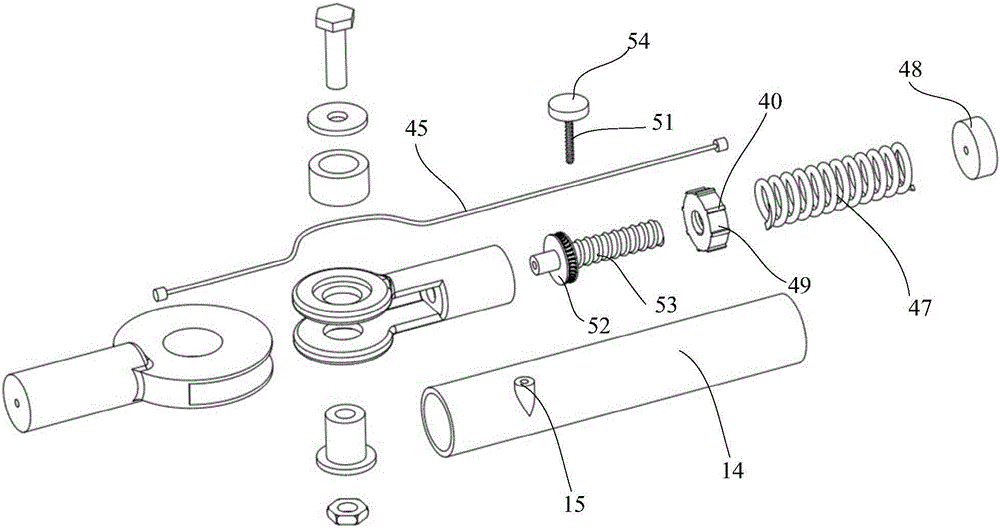
[0134] In this example, the reset is also carried out by using inclined plane fit. The difference from Example 2 is that the force application direction of the pressing mechanism is parallel to the axis of the joint. Such as Figure 5 to Figure 7 As shown, an inclined mating surface along the rotation direction is formed between the joint heads of the first limb 1 and the second limb 2, and the first limb 1 and the second limb 2 are compressed laterally by a tensioning or pressing mechanism , in the process of returning after bending, the force of the tensioning or pressing mechanism is applied to the inclined surface, so that the first limb 1 and the second limb 2 move to the initial position along the inclined surface.
[0135] In this example, a connection hole is provided at the center of the joint heads 11, 21 of the first limb 1 and the second limb 2, and a wedge plate 35 is set outside the second limb 2, and a boss 36 protrudes from the middle of the wedge plate 35 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More