

A ground-to-air amphibious quadrotor unmanned aerial vehicle
A quad-rotor UAV, ground-to-air technology, applied in the direction of vehicles that can be converted into airplanes, etc., can solve the problems of difficult flight, short battery life, and obstacles to the driving of remote-controlled smart cars, and achieve a wide range of actions, fast action, and safety. high sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing, protection scope of the present invention is not limited to the following:
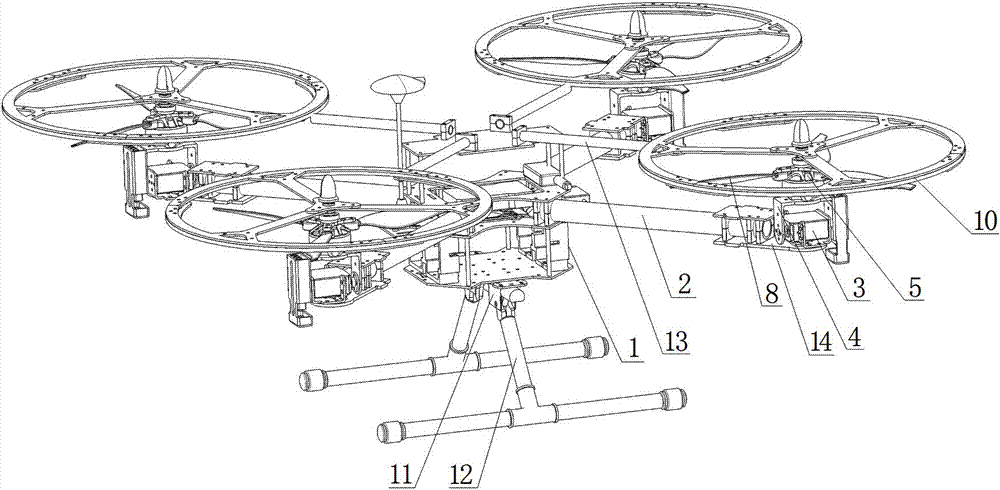
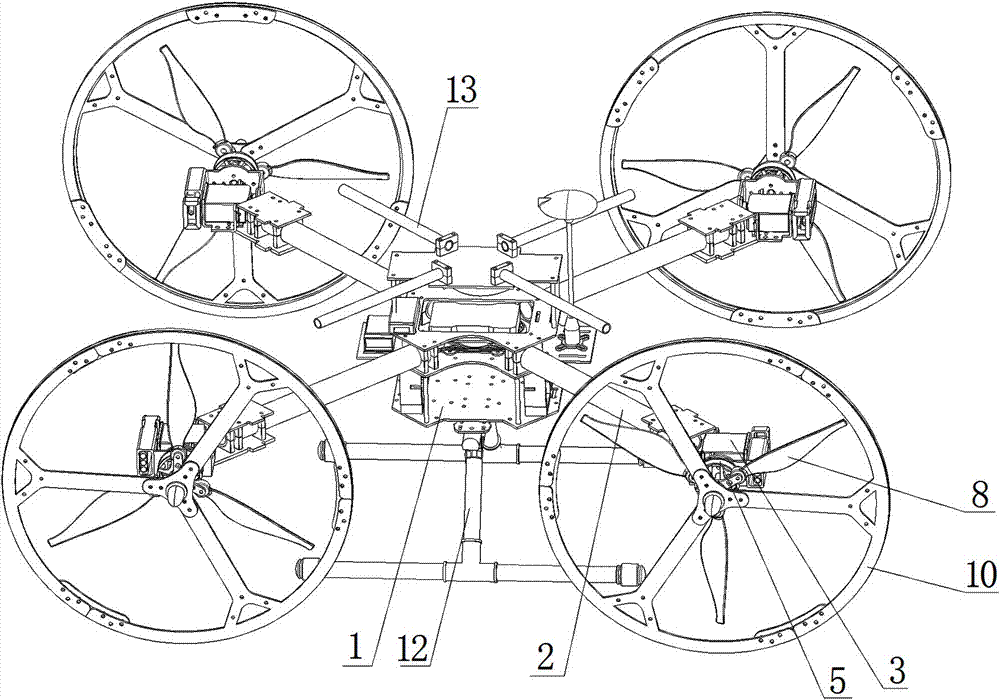
[0026] Such as figure 1 or figure 2 Shown, a ground-air amphibious four-rotor UAV, it comprises a UAV body 1 and a control unit and a battery arranged in the body 1, the four corners of the body 1 are connected to the organic arm 2, four Each machine arm 2 is distributed in an "X" shape, the angle between two adjacent machine arms 2 is 90°, and the ends of the four machine arms 2 are all connected with a mode switching mechanism.
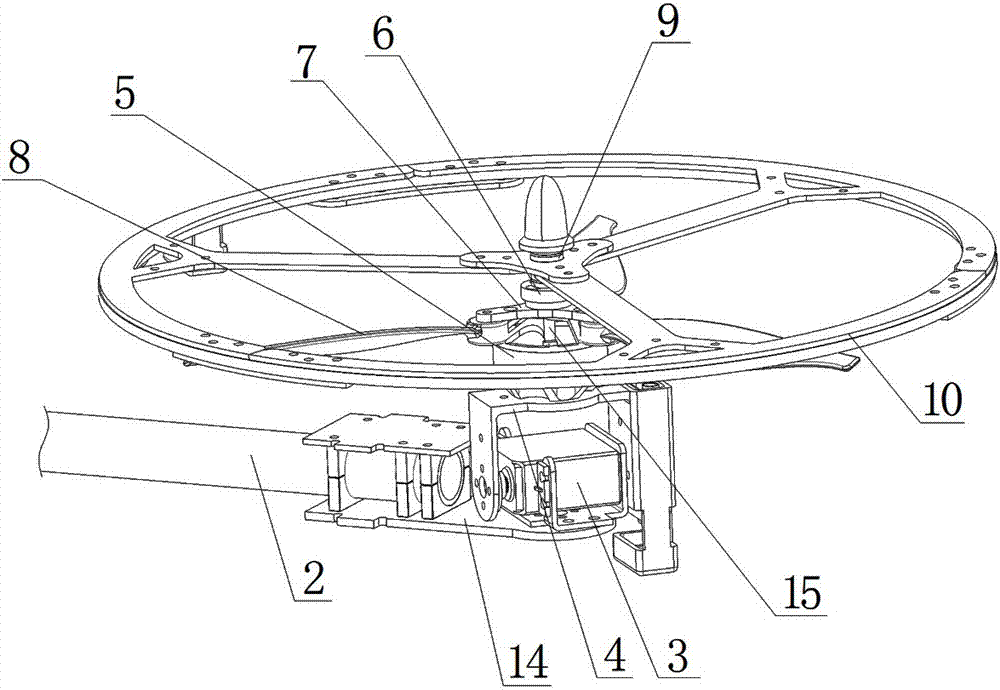
[0027] Such as Figure 1~6 As shown, the mode switching mechanism is composed of steering gear A3, steering gear base 4, brushless motor 5, stepped shaft 6, paddle base 7, propeller 8, one-way bearing 9 and wheels 10, and steering gear A3 is fixed on the At the end, the steering gear base 4 is a U-shaped bracket, the steering gear A3 is located in the steering gear bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More