

Sweeping robot way-finding method
A sweeping robot and path-finding technology, which is applied to instruments, motor vehicles, vehicle position/route/height control, etc., can solve the problems of short time consumption, route deviation, and low cleaning efficiency, so as to improve utilization rate and facilitate identification effect of position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
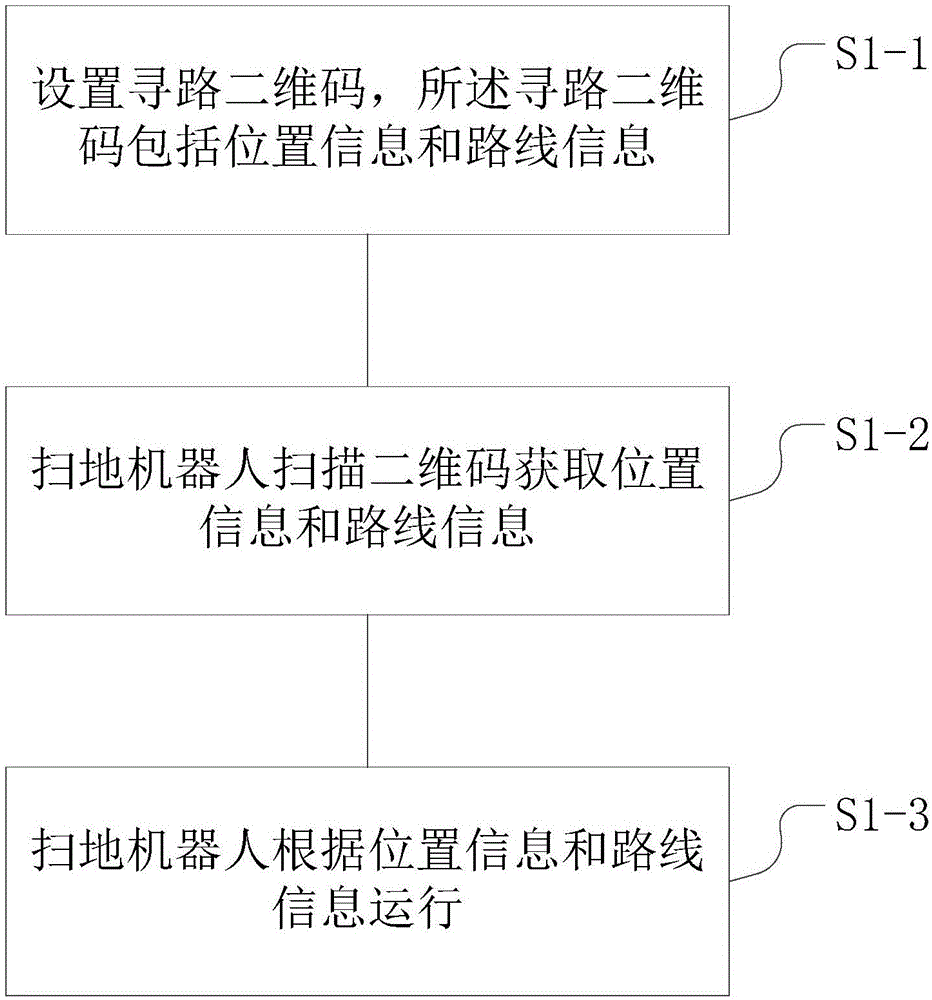
[0040] Such as figure 1 As shown, a sweeping robot pathfinding method, including steps:
[0041] S1-1: setting a wayfinding two-dimensional code, the wayfinding two-dimensional code includes location information and route information;
[0042] S1-2: The sweeping robot scans the QR code to obtain location information and route information;
[0043] S1-3: The sweeping robot operates according to the location information and route information.
[0044] Since the two-dimensional code is now easy to make and can store more data, the location information and route information are also stored in the two-dimensional code, and then set in multiple places indoors, the sweeping robot scans the two-dimensional code to obtain the location information and route information and then according to the location Information and route information are running. If you can’t clean the room along the scheduled route due to emergencies, you can quickly scan the wayfinding QR code to find the locatio...
Embodiment 2
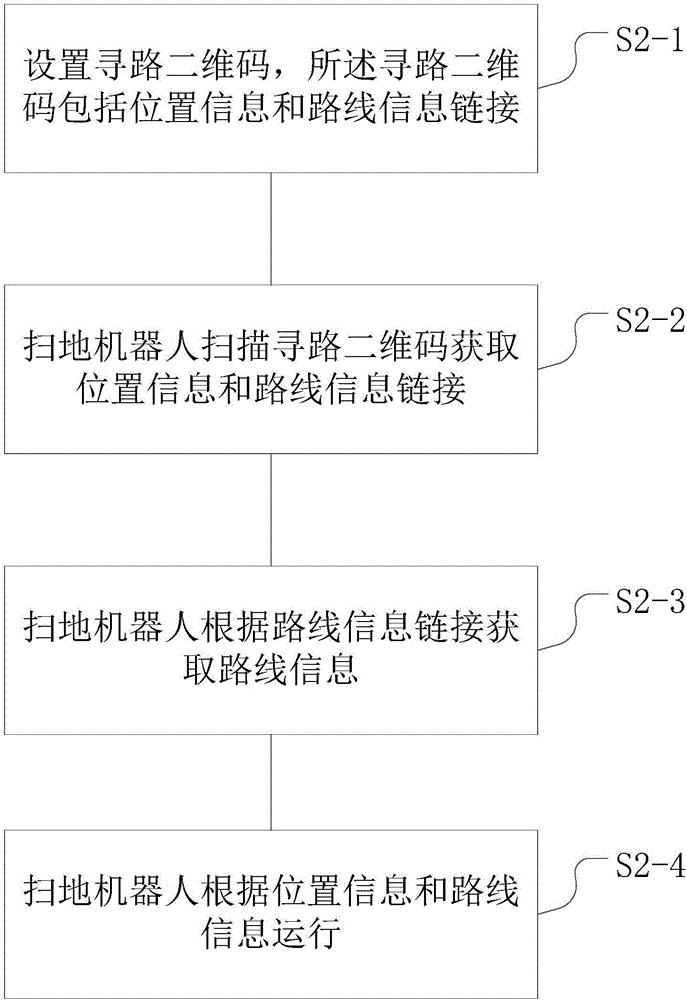
[0054] Such as figure 2 As shown, a sweeping robot pathfinding method, including steps:
[0055] S2-1: setting a wayfinding two-dimensional code, the wayfinding two-dimensional code includes location information and route information links;
[0056] S2-2: The sweeping robot scans the pathfinding QR code to obtain location information and route information links;
[0057] S2-3: The sweeping robot obtains the route information according to the route information link;
[0058] S2-4: The sweeping robot operates according to the location information and route information.
[0059] Since the two-dimensional code is now easy to make and can store more data, the two-dimensional code can also store location information and route information links, and then set it up in multiple places indoors. The sweeping robot scans the two-dimensional code to obtain the location information and route information. The location information and route information are running, and the route informati...
Embodiment 3
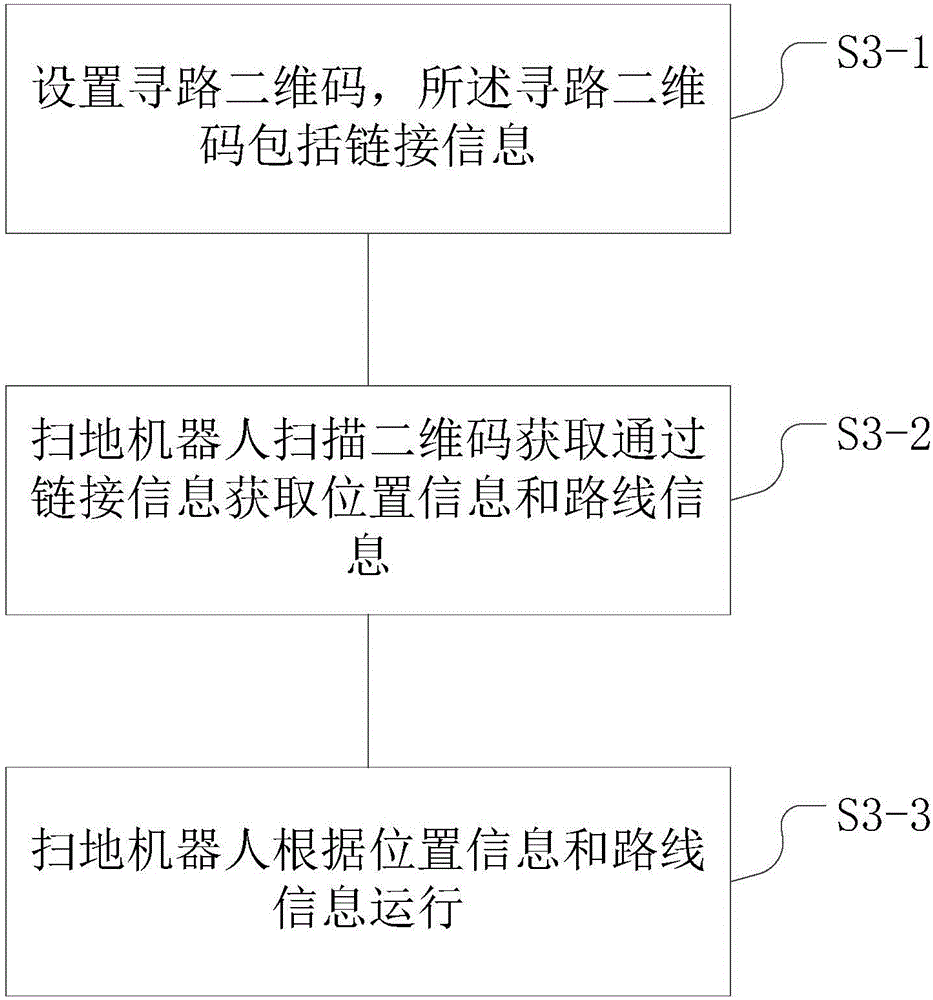
[0068] Such as image 3 As shown, a sweeping robot pathfinding method, including steps:
[0069] S3-1: Setting a pathfinding two-dimensional code, the pathfinding two-dimensional code including link information;
[0070] S3-2: The sweeping robot scans the QR code to obtain the link information, and obtains the location information and route information through the link information;
[0071] S3-3: The sweeping robot operates according to the location information and route information.
[0072] Since the two-dimensional code is easy to make now, more data can be stored, and the link information is also stored in the two-dimensional code, and the location information and route information link are obtained through the link information, and then set in multiple places indoors, the sweeping robot scans the two-dimensional code to obtain The location information and route information are then operated according to the location information and route information, and the route infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More