

Monocular vision-combined RGB-D SLAM method
A monocular vision, monocular technology, applied in image data processing, instruments, computing and other directions, can solve the problems of insufficient acquisition of depth information, RGB-D depth sensor unable to acquire depth information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The following will be combined with figure 1 -5 and Examples describe the beneficial effects of the present invention in detail, aiming to help readers better understand the essence of the present invention, but can not constitute any limitation to the implementation and protection scope of the present invention.
[0051] A RGB-D SLAM method combined with monocular vision, including the following:
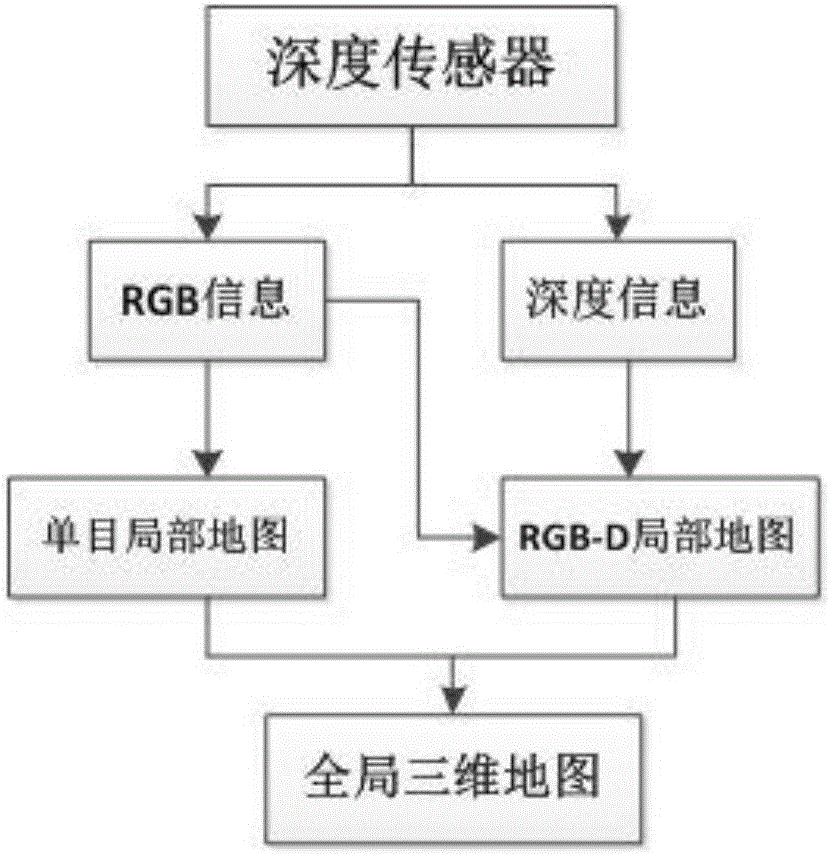
[0052] 1. Use the monocular vision method and the RGB-D depth vision method to construct the monocular local pose map and the RGB-D local pose map.
[0053] During the working process, the depth sensor can obtain two kinds of information, one is RGB color information I RGB and depth information I Depth , where the two kinds of information come from different channels. However, the actual working distance of the depth sensor is limited, so there is not always depth information feedback. In the proposed RGB-D SLAM method combined with monocular vision, the two methods are c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More