

Hand intended for being provided on a humanoid robot with improved fingers
A humanoid robot, finger technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing the complexity of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] For clarity, the same elements will be given the same designations in different drawings.
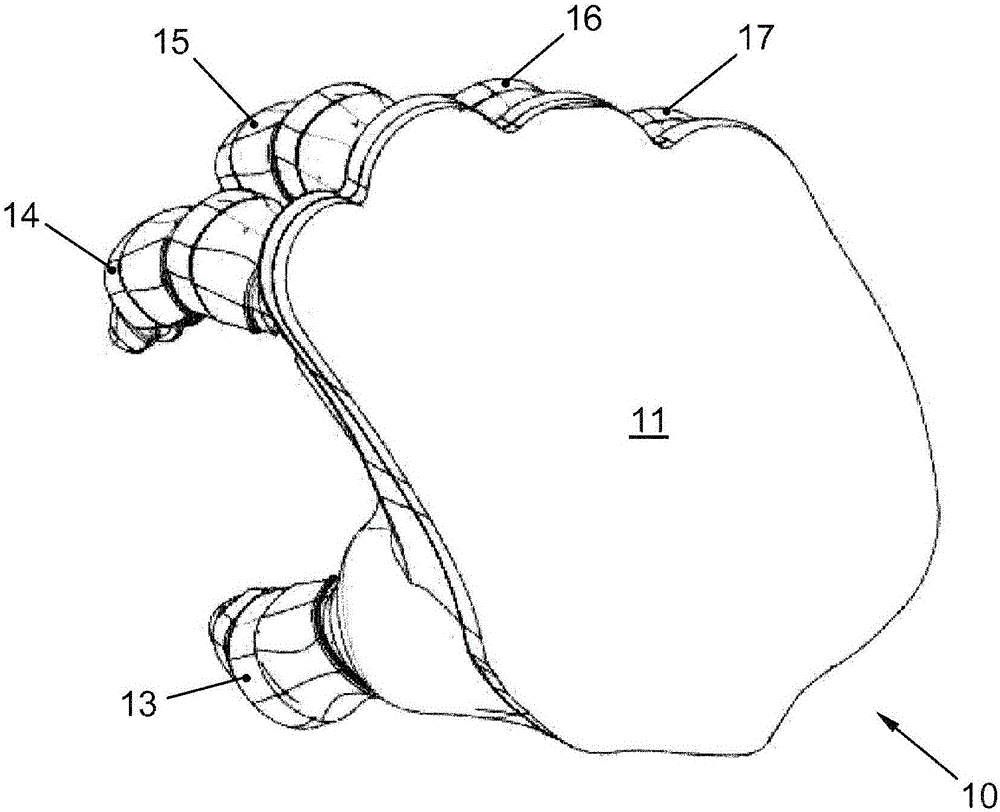
[0016] figure 1 Denotes a hand 10 for a humanoid robot. The hand 10 includes a palm 11 and five fingers 13 to 17 . The fingers articulate about the palm 11 in a manner that allows objects to be grasped between the fingers 13-17. Similar to a human hand, finger 13 is the thumb. The object grasped by the hand remains between the thumb 13 and the other fingers 14 to 17 . The invention is not limited to hands with five fingers. The number of fingers can be reduced to simplify the design of the hand, and the number of fingers can even be increased to allow grasping of specific objects.
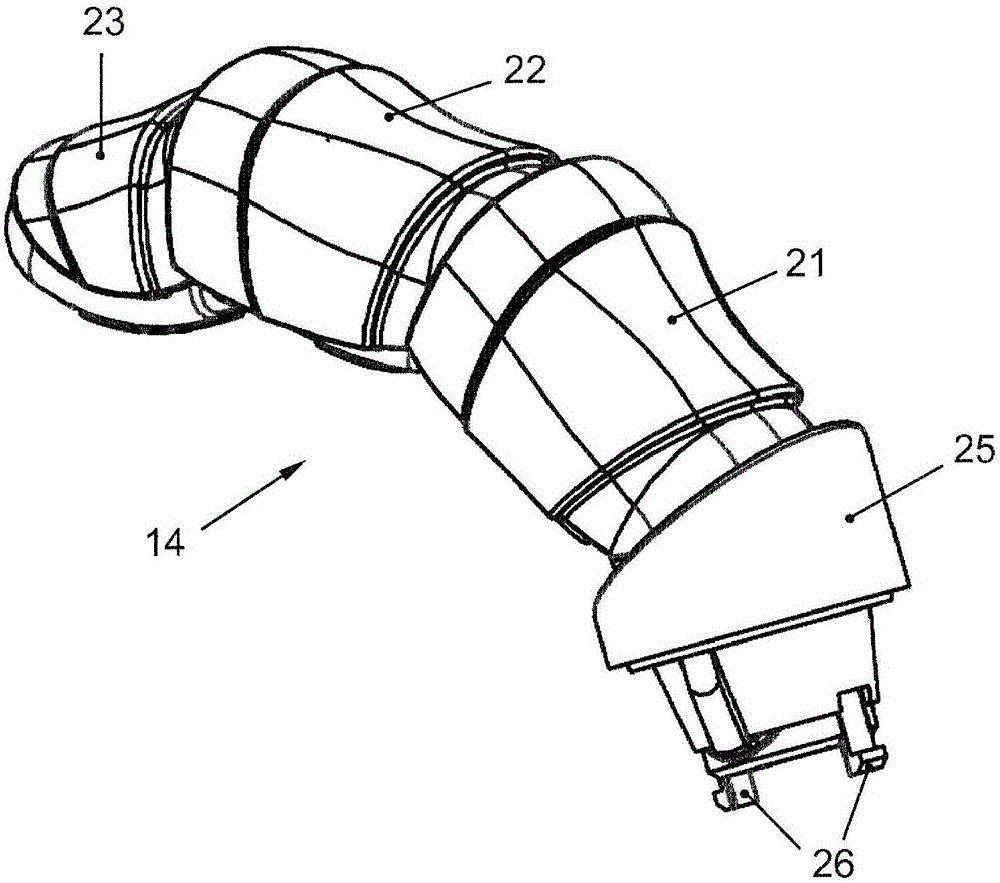
[0017] figure 2 A perspective representation of the fingers equipped with the hand 10 is shown. The finger is the index finger 14 comprising three phalanges 21 , 22 and 23 arranged in succession. The phalanges are serially articulated relative to the palm 11 of the hand 10 . More specificall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More