

Steady flight control method of multi-rotor unmanned aerial vehicle
A multi-rotor unmanned, flight control technology, applied in attitude control, non-electric variable control, control/regulation systems, etc., can solve problems such as difficult to achieve complex tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
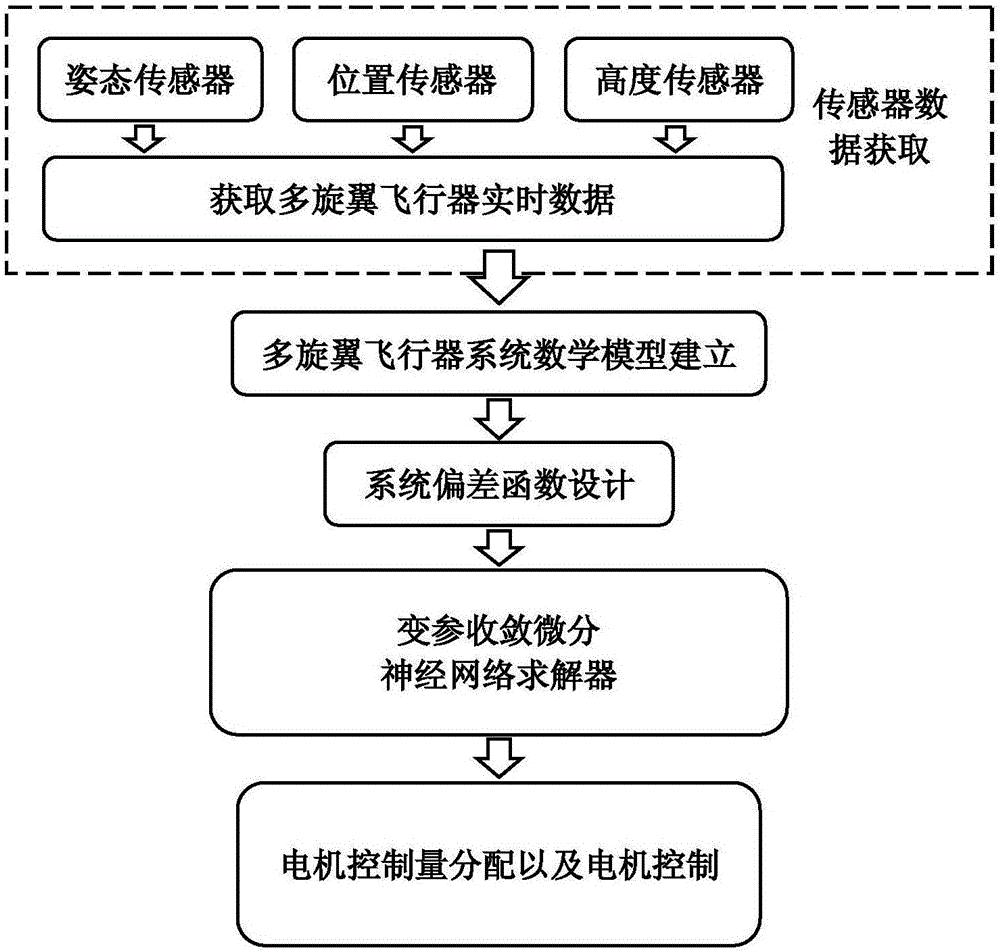
[0020] figure 1 For the design flowchart of the present invention, the design of the aircraft neural network controller can be completed by the illustrated steps:
[0021] A stable flight control method for a multi-rotor unmanned aerial vehicle, comprising the steps of:
[0022] 1) Obtain the real-time flight data of the aircraft itself through the onboard attitude sensor and the corresponding height and position sensors on the multi-rotor UAV, establish the dynamic model of the aircraft, and use the processor on the multi-rotor UAV to control the aircraft Carry out corresponding analytical processing for the kinematics problem;
[0023] 2) According to the variable parameter convergence differential neural dynamics design method, design a variable parameter convergence differential neural network solver for the multi-rotor aircraft dynamics model;
[0024] 3) Utili...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More