

A Variable Stiffness Flexible Rotary Joint
A flexible rotation and joint technology, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of difficult to achieve linear adjustment of stiffness, plastic twist of elastic reed, nonlinear change of stiffness, etc., to achieve easy control and shorten the axial direction. Length, the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with accompanying drawing.
[0046] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
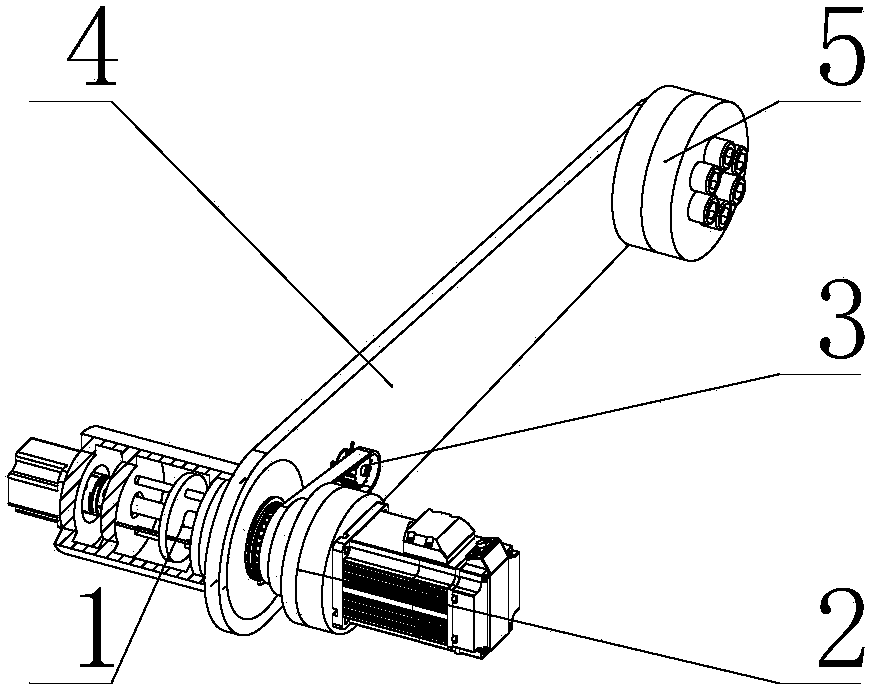
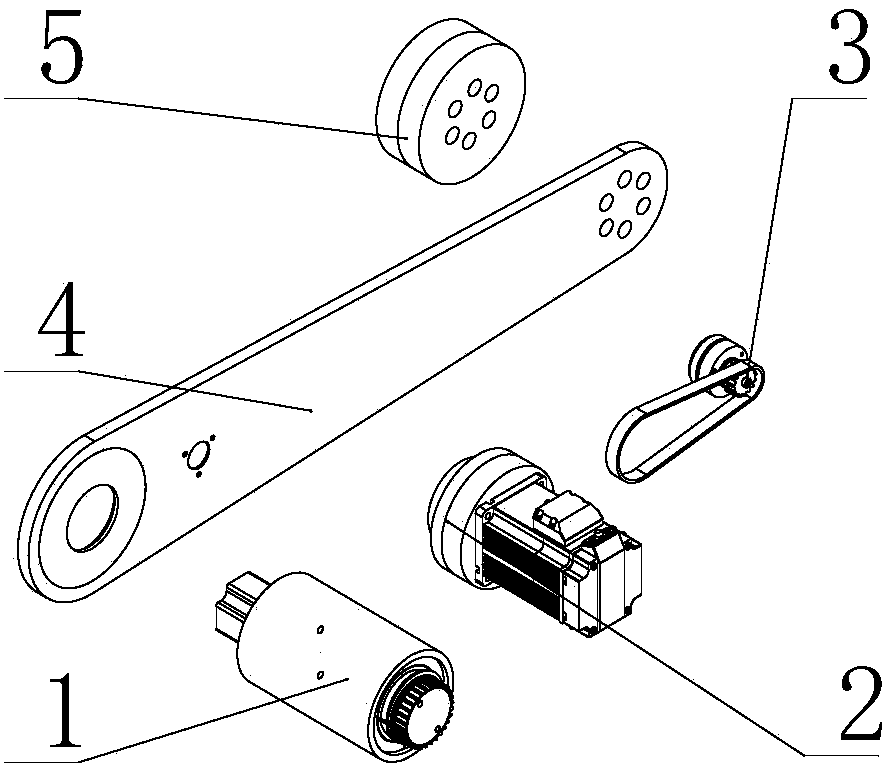
[0047] Among them, the present invention is attached figure 1 and figure 2 as a basis, with figure 1 and figure 2 The front, back, left, right, up and down are front, back, left, right, up and down of the present invention. It should be noted that the relative arrangement, numerical values, etc. of components set forth in the present embodiment are no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More