Four-feet electromagnetic adsorption wall climbing robot
A wall-climbing robot, electromagnetic technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of difficult to achieve a spherical surface with a small radius, low flexibility, etc., to enhance the adsorption capacity and adsorption reliability, improve flexibility and adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings:
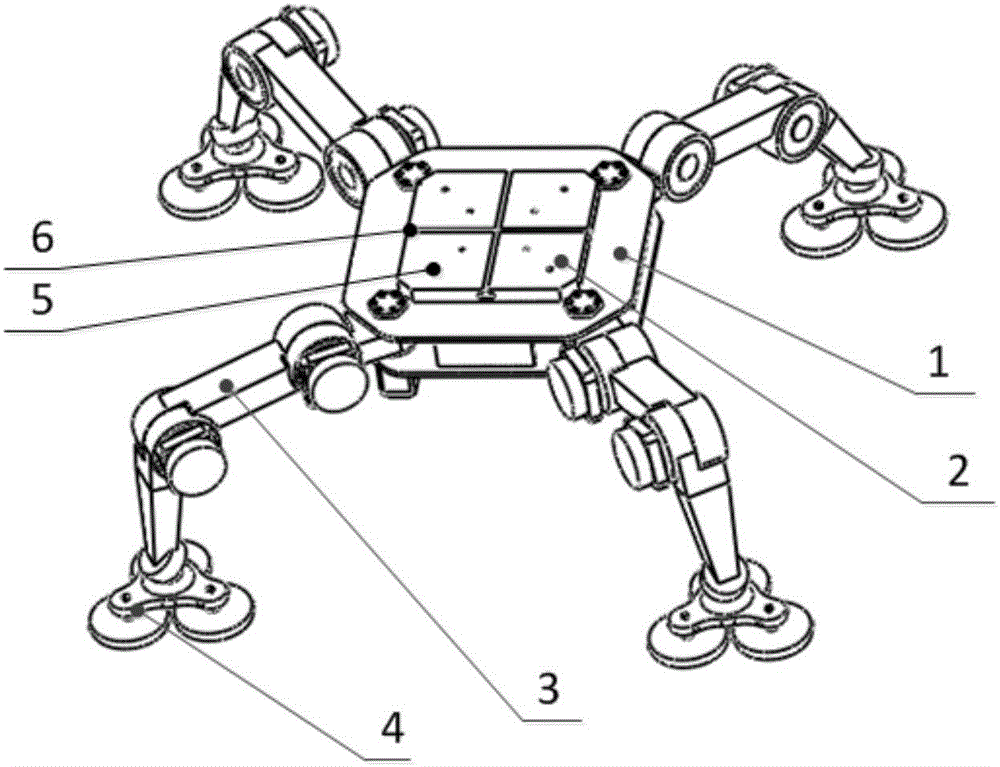
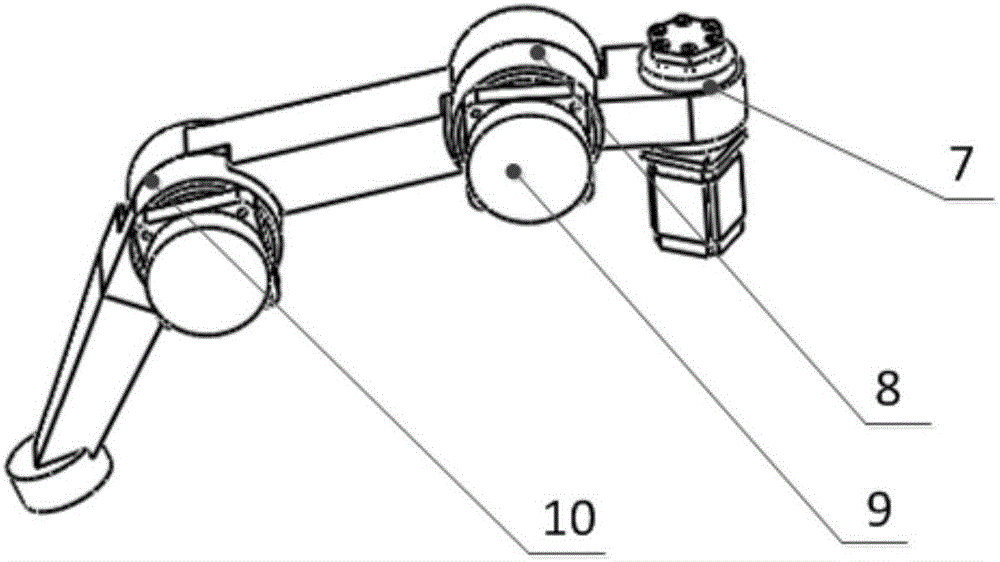
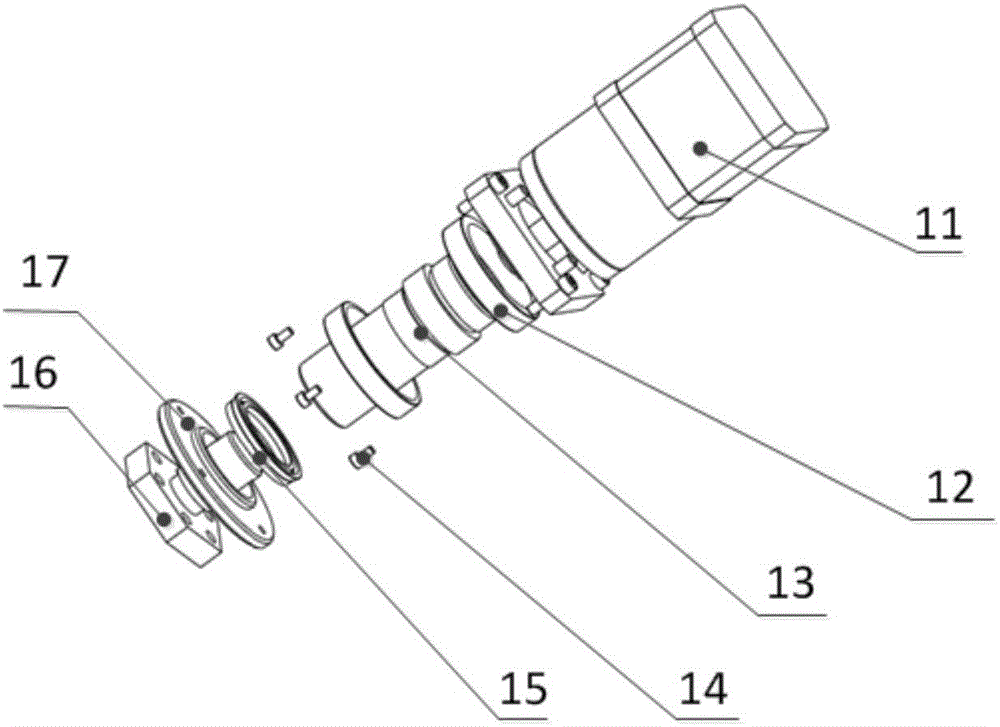
[0027] See Figure 1 to Figure 4 , A four-legged electromagnetic adsorption wall-climbing robot, including a chassis 1, walking legs 3, additional tooling 2 and foot adsorption device 4; the robot chassis 1 is composed of an upper connecting plate, a lower connecting plate and additional tooling 2. The chassis adopts Lightweight metal alloy materials reduce the robot's own weight. Additional tooling 2 is designed on the chassis to expand the function of the wall-climbing robot; the walking leg 3 includes a multi-joint tandem mechanism connected to the chassis 1 and a multi-joint tandem mechanism installed at each joint Several driving mechanisms; the foot suction device 4 includes a disk mounting plate 18 and an electromagnetic chuck 21 connected by a passive ball hinge 20 and a multi-joint series mechanism to realize the movement of the foot when walking. The m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More