A kind of manipulator and a kind of robot
A technology of manipulators and driving mechanisms, applied in manipulators, chucks, agriculture, etc., can solve the problems of inconvenient movement, heavy manipulator weight, etc., and achieve the effect of small hindrance, powerful functions and good portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. It is only stated here that the words for directions such as up, down, left, right, front, back, inside, and outside that appear or will appear in the text of the present invention are only based on the accompanying drawings of the present invention, and are not specific to the present invention. limited.
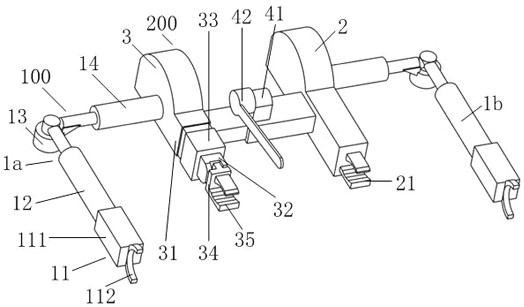
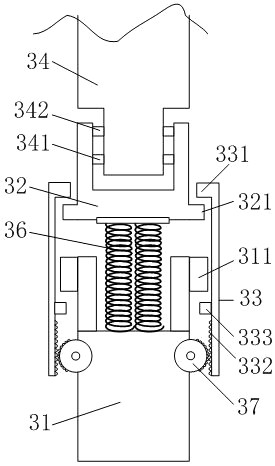
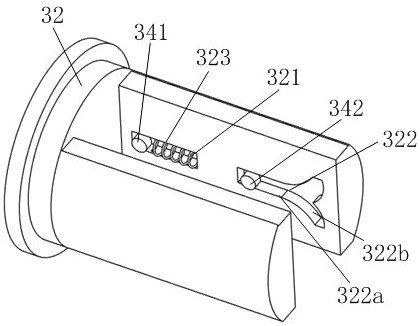
[0027] Such as Figure 1-Figure 5 As shown, the first embodiment of the present invention provides a manipulator, including a displacement driving section 100 and a limiting section 200; the displacement driving section 100 includes first claw arms 1a and The second claw arm 1b, the first claw arm 1a and the second claw arm 1b have the same structure, and both include a clamping claw assembly 11, a first telescopic section 12, a rotary drive mechanism 13 and a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More