Mobile robot path planning method and system based on improved ant colony algorithm
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A mobile robot and path planning technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve problems such as slow running speed and slow convergence speed
Inactive Publication Date: 2016-12-07
JIANGSU UNIV OF TECH
View PDF6 Cites 48 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
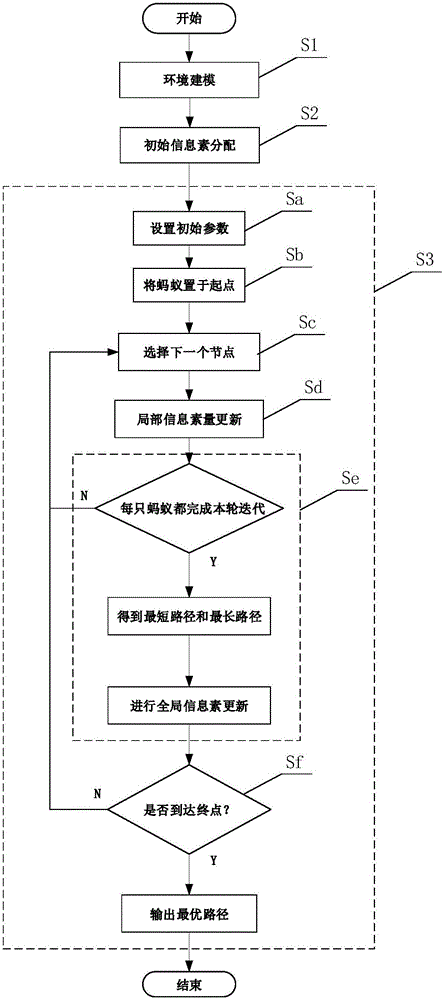
[0078] like figure 1 As shown, the present embodiment 1 provides a mobile robot path planning method, including:
[0079] Step S1, environment modeling;
[0080] Step S2, initial pheromone distribution; and
[0081] Step S3, path optimization, and outputting the optimal path.
[0082] As a preferred implementation of environment modeling, the environment modeling in the step S1 is to adopt grid environment modeling according to the environment information of the mobile robot. Specifically, the method of using grid environment modeling according to the environment information of the mobile robot includes: using the mobile robot's own sensor group (such as but not limited to cameras, sonar rings, infrared sensors) to collect working environment information, and carry out Map modeling; among them, the mobile robot and each city are used as particle points, the mobile robot and obstacles are modeled according to the two-dimensional coordinate system, and the coordinate processi...
Embodiment 2
[0109] On the basis of embodiment 1, this embodiment 2 also provides a mobile robot path planning system, including:
[0110] The environment modeling unit adopts grid environment modeling according to the environment information of the mobile robot;
[0111] The path planning unit distributes the initial pheromone and outputs the optimal path through path optimization.
[0112] Wherein, the environment modeling unit includes: a mobile robot with environmental information collection sensors;
[0113] The mobile robot collects working environment information and performs map modeling; wherein, the mobile robot and each city are used as particle points, and the mobile robot and obstacles are modeled according to a two-dimensional coordinate system.
[0114] The path planning unit outputs the optimal path through initial pheromone allocation and path optimization; wherein
[0115] Initial pheromone allocation, that is, the initial pheromone is allocated according to the principle...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a mobile robot path planning method and system based on an improved ant colony algorithm. The mobile robot path planning method comprises the following steps of 1 environment modeling, 2 initial pheromone distribution and 3 optimal path searching and optimal path outputting. According to the mobile robot path planning method and system based on the improved ant colony algorithm, improvement is conducted on a previous traditional ant colony algorithm in the initial pheromone distribution aspect, ants can guide optimization of the ants at the beginning, and the early convergence speed is obviously increased; meanwhile initial parameters are reasonably selected, for instance, selection of pheromone evaluation, a result does not run into a locally optimal solution or has difficulty in forming an optimal solution, reasonable improvement is conducted on a pheromone update mode, the situation of running into the locally optimal solution can be effectively avoided, and the working efficiency and working reliability of the robot can be improved.
Description
technical field [0001] The invention relates to the technical field of intelligent algorithms for mobile robots, in particular to a path planning method for mobile robots based on an improved ant colony algorithm. This method effectively avoids the local optimal solution and overcomes the problem of slow convergence. Background technique [0002] Mobile robot path planning refers to the planning of the robot's trajectory, that is, specifying the mobile robot in an environment with obstacles, and at the same time given a specific starting point and end point, under the given evaluation conditions, the mobile robot avoids obstacles according to the given task. Open obstacles and search for the optimal path from the start point to the end point, which requires the shortest time, the shortest path or the least energy consumption. At present, many intelligent algorithms are used in the path planning of mobile robots, including neural network method, ant colony algorithm, artific...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More