

Hysteresis Compensation Control Method of Ultrasonic Motor Servo Control System Based on Observer
A servo control system, ultrasonic motor technology, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve the problems of cycle repetition signal control error, system performance impact, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
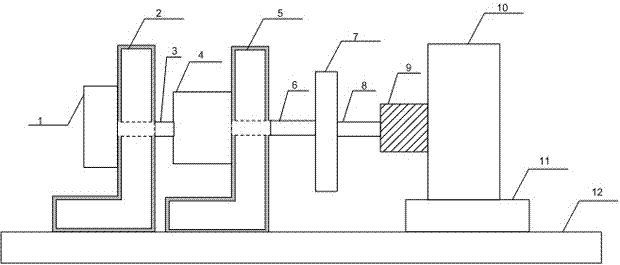
[0058] The hysteresis compensation control method of the ultrasonic motor servo control system based on the observer of the present invention provides an ultrasonic motor servo control system, such as figure 1 As shown, it includes a base 12 and an ultrasonic motor 4 arranged on the base 12, the output shaft 3 of the ultrasonic motor 4 is connected to the photoelectric encoder 1, and the output shaft 6 on the other side is connected to the flywheel inertial load 7 , the output shaft 8 of the flywheel inertial load 7 is connected to the torque sensor 10 through the elastic coupling 9, and the signal output end of the photoelectric encoder 1 and the signal output end of the torque sensor 10 are respectively connected to the control system. The ultrasonic motor 4 , photoelectric encoder 1 and torque sensor 10 are respectively fixed on the ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More