

Single-degree-of-freedom humanoid display robot
A degree of freedom and humanoid technology, applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems of numerous components, difficult control, accumulation of robot motion errors, etc., and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
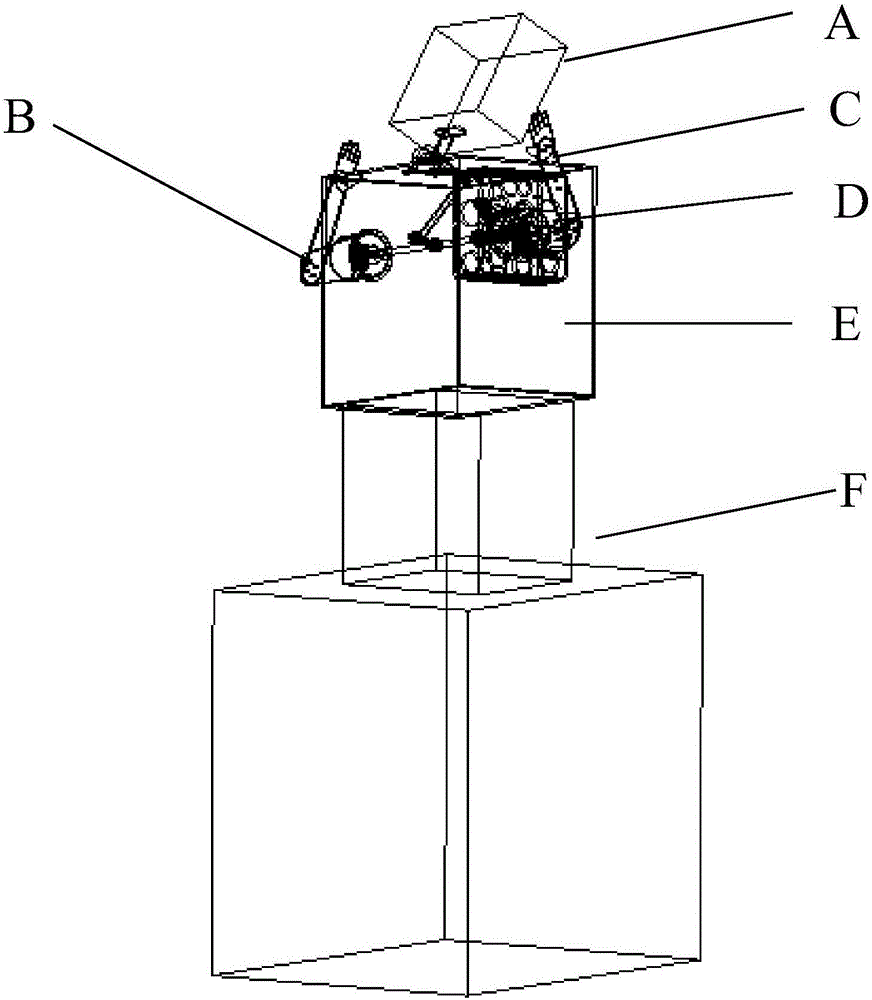
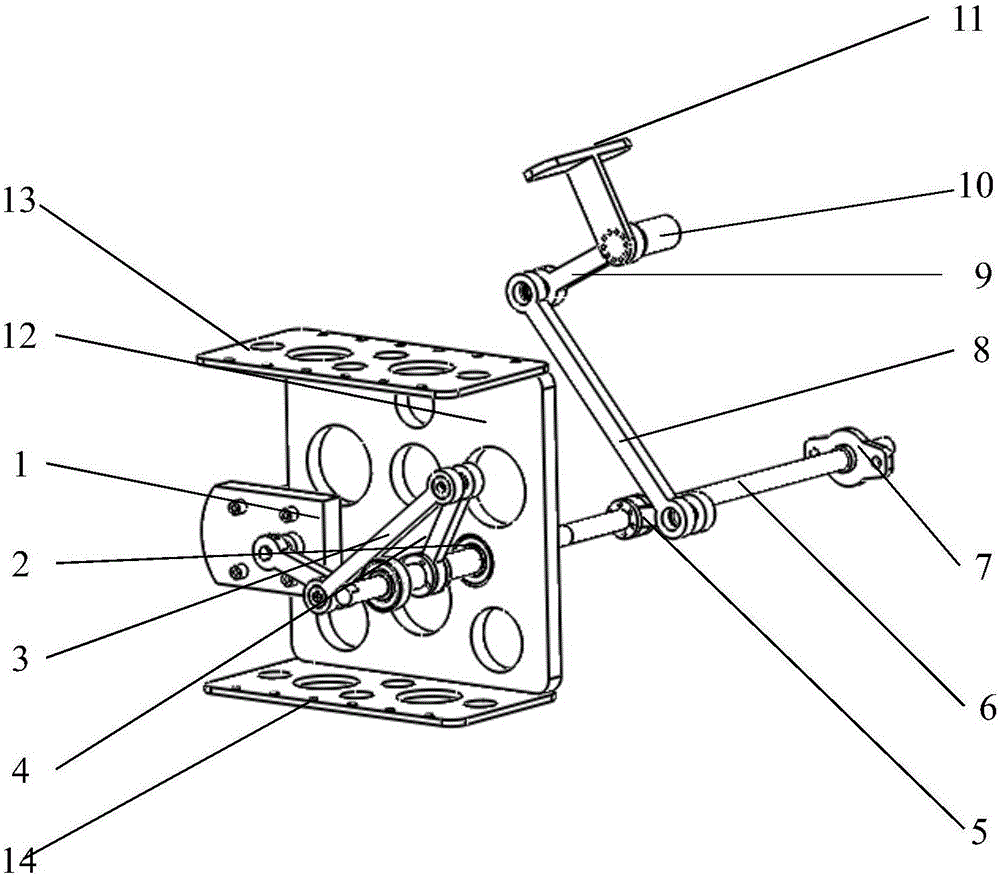
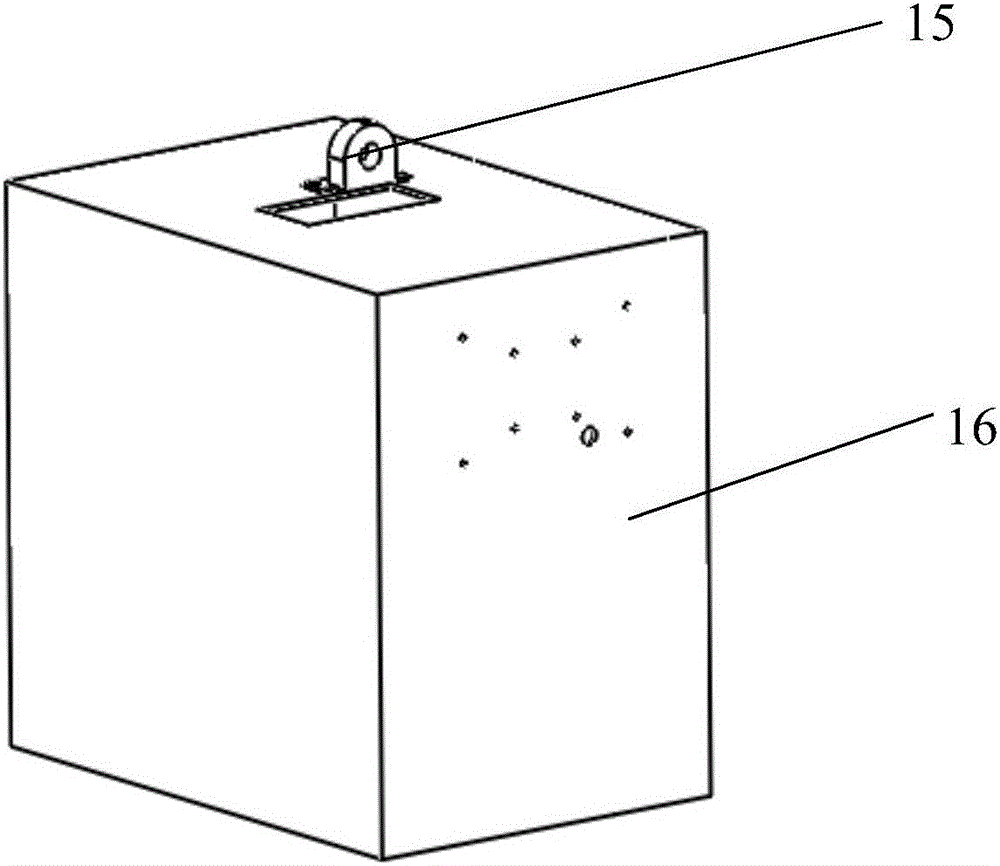
[0020] The embodiment of the present invention proposes a single-degree-of-freedom link mechanism and a single-degree-of-freedom humanoid display robot. Such as figure 1 As shown, the single-degree-of-freedom humanoid display robot includes: Figure 4 The head A shown, such as Figure 5 Shown left arm B, right arm C, as shown figure 2 The single-degree-of-freedom link mechanism D shown, such as image 3 The torso E shown, as Figure 6 Base F shown.
[0021] Wherein, the left arm B and the right arm C may have the same structure or different structures. In one embodiment of the present invention, the structure of the left arm B and the right arm C can be as follows Figure 5 Shown, comprise palm 18, forearm 19, big arm 20; wherein palm 18 bottoms ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More