Negative-pressure self-adaptive adjusting device for negative-pressure type wall-climbing robot
A wall-climbing robot and self-adaptive adjustment technology, applied in the field of robot technology and automation control, can solve the problems of large robot volume, low availability, low wall-climbing efficiency, etc., and achieve simple system structure, stable air pressure, and increased fan speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
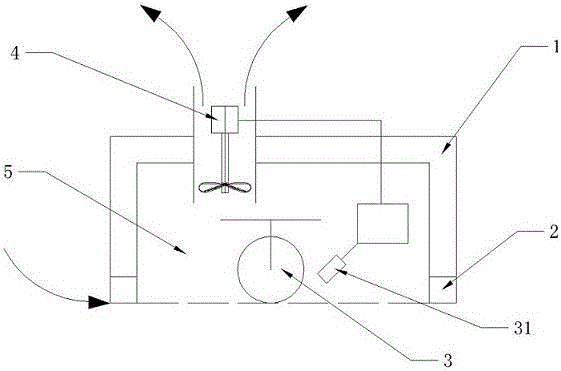
[0024] Embodiment 1, refer to Figure 1 to Figure 4 , the present invention comprises robot outer wall 1, gasket 2, driving device 3, centrifugal blower 4, and robot outer wall is provided with opening, makes robot outer wall and robot working plane form negative pressure chamber 5, and robot is provided with driving device, and on the driving device The pressure sensor 31 is installed, and the centrifugal blower is installed on the outer wall of the robot. By working through the centrifugal blower, the ratio of the gas extraction amount of the air outlet and the gas intake of the wall contact surface gap inlet is adjusted to reduce the internal pressure of the robot.
Embodiment 2
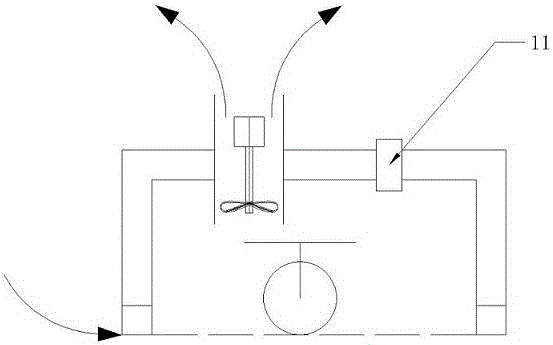
[0025] Embodiment 2, refer to Figure 1 to Figure 4 , the present invention can also include robot outer wall 1, sealing gasket 2, driving device 3, centrifugal blower 4, and robot outer wall is provided with opening, makes robot outer wall and robot working plane form negative pressure chamber 5, and robot is provided with air pressure automatic regulating valve 11. The air pressure automatic regulating valve is installed on the outer wall of the robot. When the internal pressure of the robot is too high, the air pressure regulating valve will open under the action of pressure, allowing the external airflow to slowly flow into the cavity, that is, increasing the gas intake volume of the cavity through the valve. The air pressure in the cavity is adjusted to adjust the atmospheric pressure received by the cavity. The rest are the same as any other embodiment of the present invention or the combination of more than two embodiments.
Embodiment 3
[0026] Embodiment 3, refer to Figure 1 to Figure 4 , the outer wall 1 of the robot of the present invention includes a side wall and a bottom wall, and a gasket is installed on the end face of the side wall of the robot to reduce the working contact plane gap of the robot and form a closed environment in the robot. The rest are the same as any other embodiment of the present invention or the combination of more than two embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More