Method for planning robot paths on basis of path expansion ant colony algorithms
A technology of path planning and ant colony algorithm, applied in navigation computing tools and other directions, can solve the problems of falling into local minima and low computing efficiency, and achieve the effect of high algorithm efficiency, strong search ability, and suppression of falling into local optimum.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
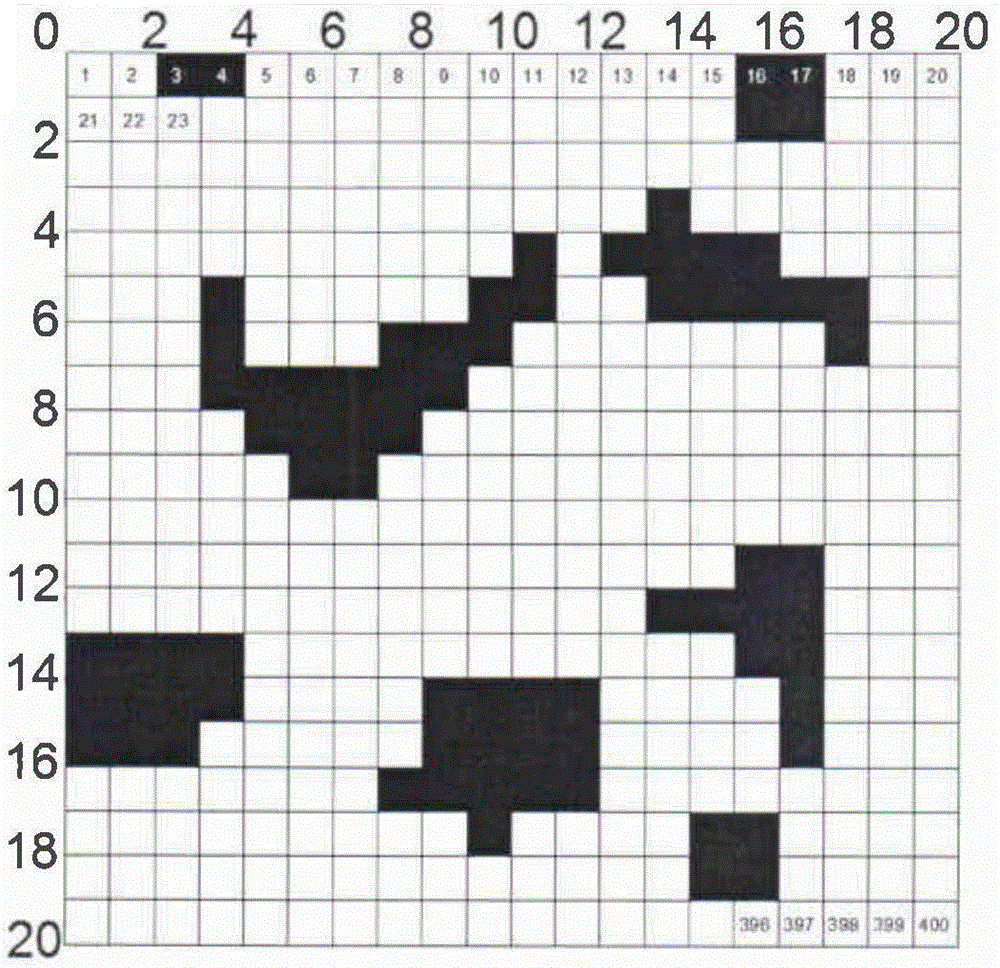
[0034] When a robot walks in a complex working environment, it will be blocked by many obstacles of various shapes. The present invention uses the grid method to model the working environment of the robot to obtain a random map, such as figure 1 The grid map model diagram shown, in which the white grid is the free grid, which is the feasible area of the robot, and the black grid is the obstacle grid, which is the area that the robot cannot pass. In order to describe the walking trajectory of the robot, figure 1 The medium unit grid is about the size of the robot. And code the rasters in the model from left to right and from top to bottom, and a raster represents a position node.
[0035] In the path optimization process, the ant colony algorithm is a search algorithm that simulates the behavior of ant colony foraging and finds the optimal path in a specified environment. Through research, it is found that when ants walk, they will release a special secretion - pheromone o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More