

Path sweeping method, device and system of sweeping robot
A sweeping robot and cleaning system technology, applied in the field of robotics, can solve problems such as straight line failure, low coverage, and bow-shaped path failure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
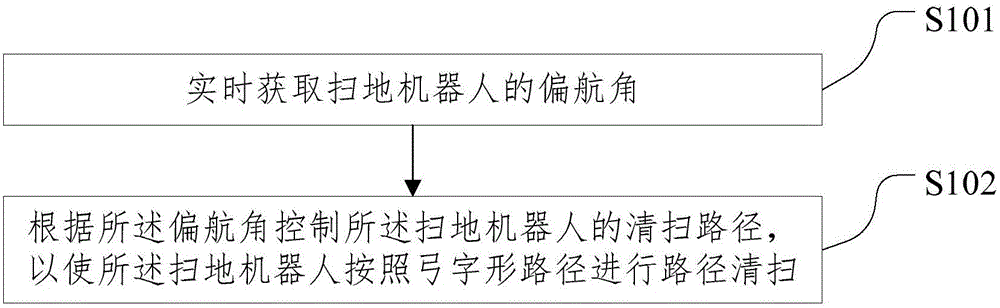
[0042] figure 1 It is a flow chart of the path cleaning method of the sweeping robot in an embodiment of the present invention; refer to figure 1 , the method includes:
[0043] S101: Obtain the yaw angle of the sweeping robot in real time;
[0044] It should be noted that the execution subject of the method in this embodiment is a controller, and the controller is used to control the walking of the sweeping robot, which can be installed on the robot, that is, as a control device of the sweeping robot, or The sweeping robot may not be installed on the sweeping robot, but may be controlled to walk by remote control. Of course, it may also be other components with similar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More