UAV (Unmanned Aerial Vehicle) path planning method for electromagnetic interference environment
A path planning and electromagnetic interference technology, applied in the field of drones, can solve problems such as slow search speed, premature convergence, and inability to meet the real-time path planning of drones, and achieve the effect of improving search speed, overall situation and search capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The unmanned aerial vehicle path planning method used in the electromagnetic interference environment of the present invention comprises the following steps:
[0027] The path planning method for the unmanned aerial vehicle in an electromagnetic interference environment includes the following steps:
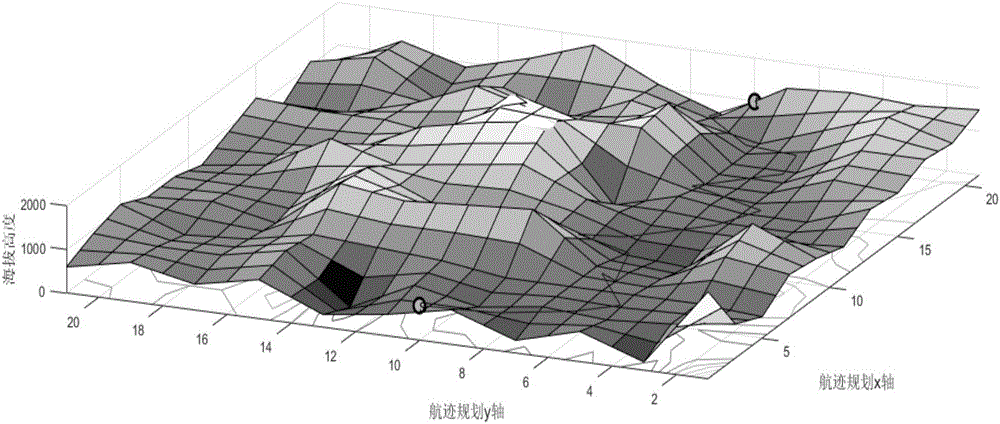
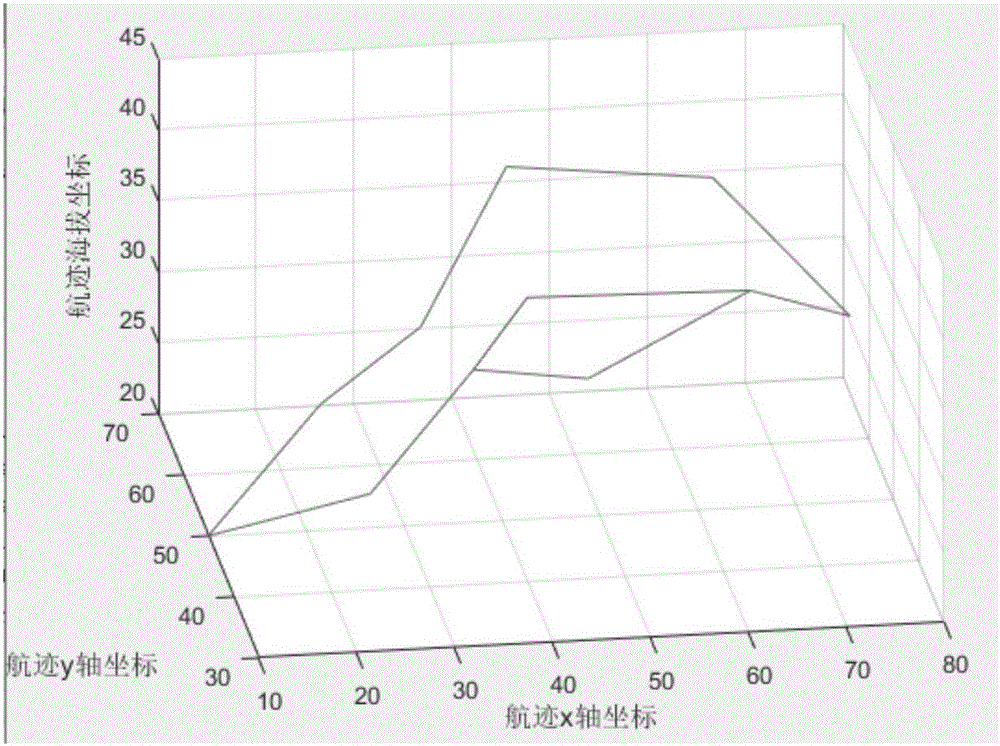
[0028] S1, collect drone operation target points;
[0029] S2. Set the initial value of pheromone τ ij (0)=h, wherein h is a constant, the ant colony scale is set as M, and the maximum number of iterations is set as N;
[0030] S3. Randomly assign M ants to each target point, and add the target points assigned by the ants to their respective prohibition lists;
[0031] S4. All ants select the next node according to the state transition formula, 1≤k≤M, and the state transition formula is as follows:
[0032] in, Indicates the probability that ant k transfers from node i to node j at the tth iteration, 1≤t≤N, τ ij (t) represents the information concentration containe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More