Line patrol robot for comprehensively monitoring power lines and method thereof
A line inspection robot and power line technology, applied in the field of line inspection robots, can solve problems such as missing monitoring points, complex actual environment of power lines, and affecting monitoring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
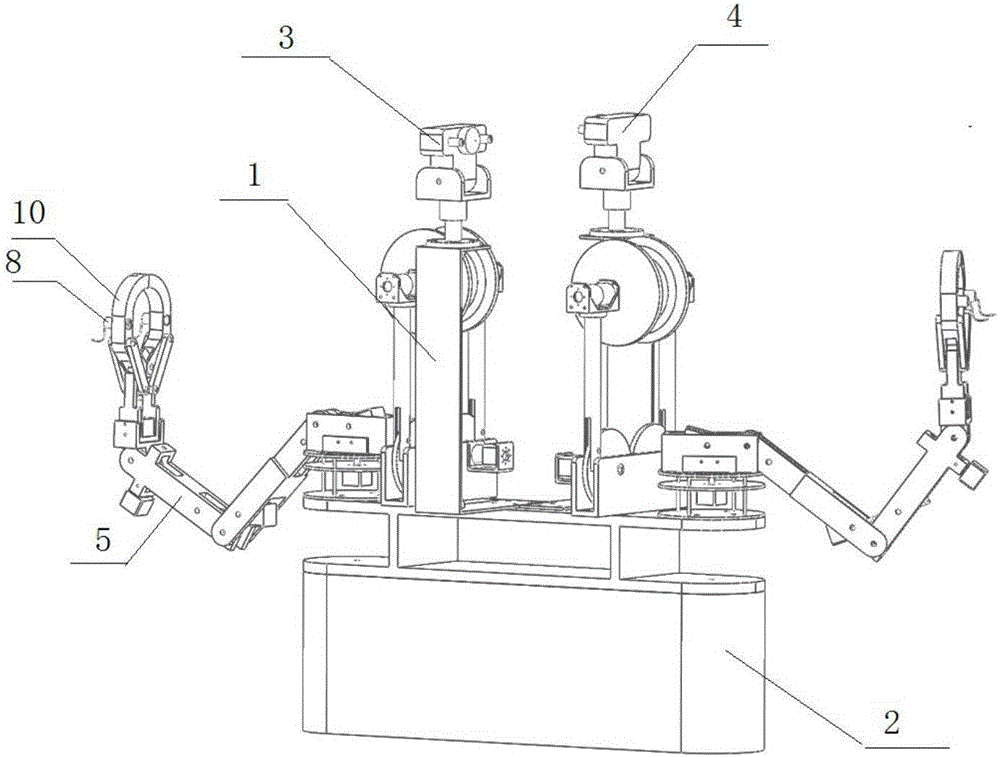
[0048] figure 2 It is a structural schematic diagram of Embodiment 1 of a line inspection robot for omnidirectional monitoring of power lines of the present invention.
[0049] In this embodiment, a line patrol robot with a mechanical arm with four degrees of freedom is taken as an example: 1) the upper arm rotates in the horizontal plane; 2) the upper arm rotates in the vertical plane; 3) the small arm rotates relative to the upper arm; 4) the end execution The device flips over. With the support of these 4 degrees of freedom, this camera module can reach any area within the working range for monitoring.
[0050] Such as figure 2 As shown in the line inspection robot for all-round monitoring of power lines, the electric control box is equipped with a controller, including:
[0051] The frame 1 has an electric control box 2 installed at the bottom; the frame 1 is equipped with a first image acquisition module 3 and a second image acquisition module 4, which are respective...
Embodiment 2
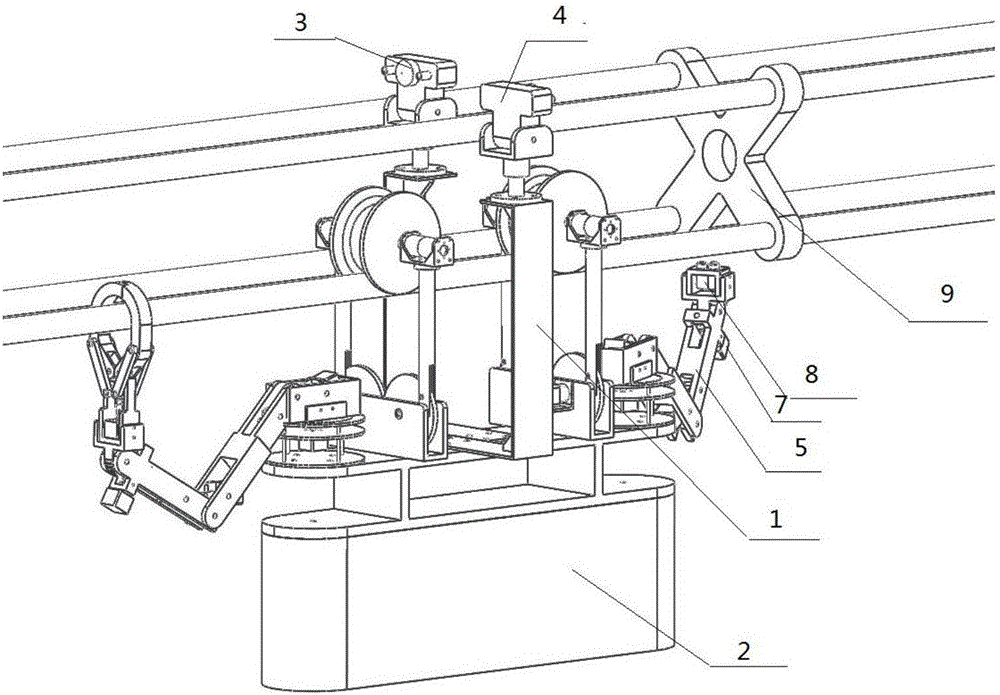
[0068] image 3 It is a structural schematic diagram of Embodiment 2 of a line inspection robot for omnidirectional monitoring of power lines of the present invention.
[0069] Such as image 3 As shown in the line inspection robot for all-round monitoring of power lines, the electric control box is equipped with a controller, including:
[0070] The frame 1 has an electric control box 2 installed at the bottom; the frame 1 is equipped with a first image acquisition module 3 and a second image acquisition module 4, which are respectively used to monitor the power lines in the forward direction and the opposite direction of the line patrol robot Running status image information;
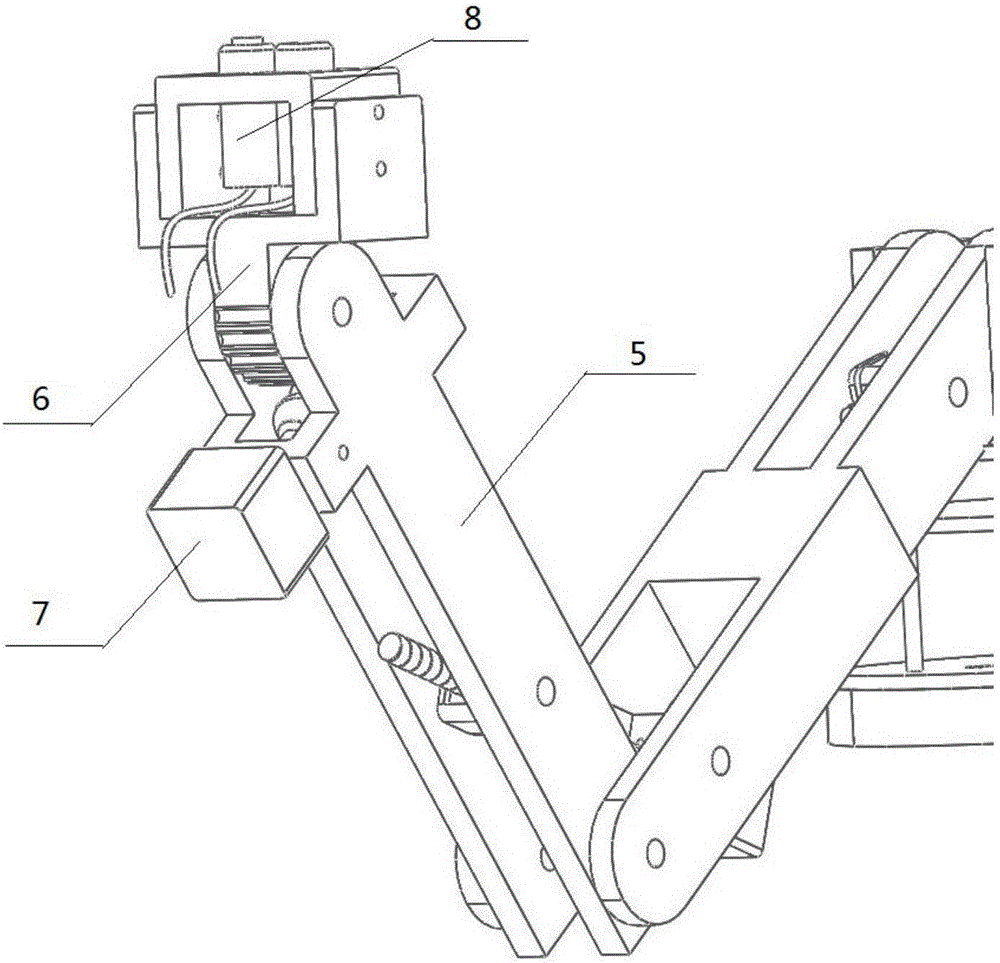
[0071] The traveling mechanism includes a driving module and a mechanical arm 5, the driving module is connected with the controller in the electric control box, the end of the mechanical arm 5 is equipped with a manipulator 10, and the third image acquisition module 8 is installed on the manipulato...
Embodiment 3
[0085] Figure 4 It is a structural schematic diagram of Embodiment 3 of a line inspection robot for omnidirectional monitoring of power lines of the present invention.
[0086] Such as Figure 4 As shown in the line inspection robot for all-round monitoring of power lines, the electric control box is equipped with a controller, including:
[0087] The frame 1 has an electric control box 2 installed at the bottom; the frame 1 is equipped with a first image acquisition module 3 and a second image acquisition module 4, which are respectively used to monitor the power lines in the forward direction and the opposite direction of the line patrol robot Running state image information; an image acquisition instrument 11 is also placed on the frame 1;
[0088]The traveling mechanism includes a driving module and a mechanical arm, the driving module is connected to the controller, and a manipulator 10 is installed at the end of the mechanical arm; under the control of the controller,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com