

Edge-based local stereo matching method
A stereo matching and partial technology, applied in the field of image processing, can solve the problems of foreground expansion, high complexity, poor parallax effect in discontinuous depth areas, etc., and achieve the effect of fast speed, low complexity and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
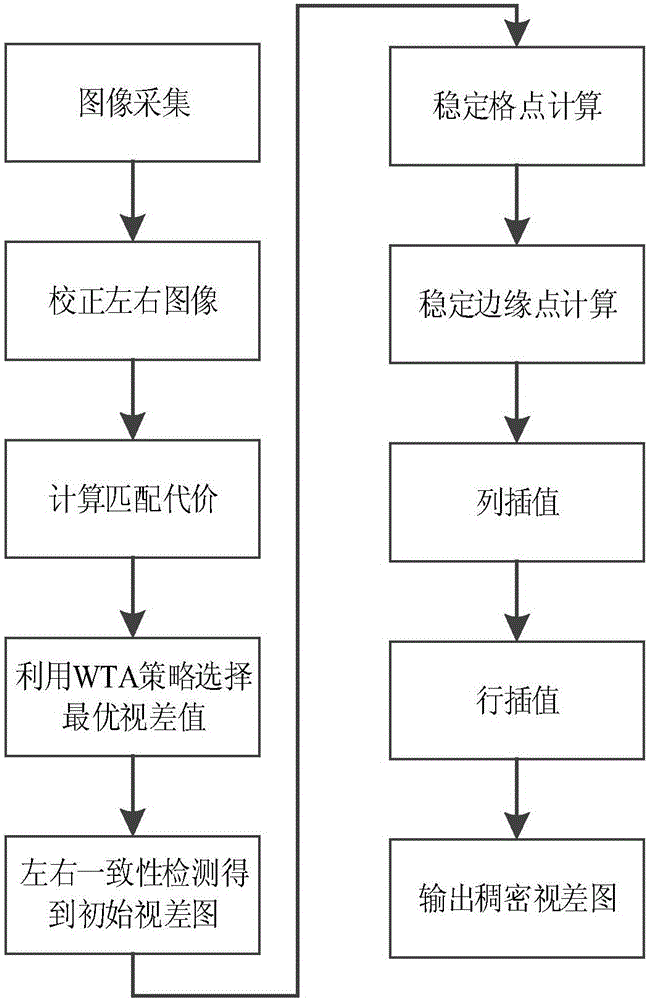
[0019] The present invention can be divided into initial parallax calculation and stable point interpolation in two stages, such as figure 1 shown.
[0020] For the initial disparity calculation, it can be divided into the following four steps:
[0021] Based on the consistency constraints of binocular vision, the left and right disparity maps are checked for left and right consistency, that is, the parallax at the same coordinate position in the left disparity map and the right disparity map are the same, and the parallax of the occlusion point is effectively corrected to obtain the initial disparity map. .
[0022] Step 1: Input the corrected left and right images, and calculate the gradient of the left and right images.
[0023] Step 2: Use the gradient as the matching cost of the initial disparity calculation, take a fixed window for each pixel, and aggregate the matching costs in the window to obtain the aggregated cost of each pixel. In this embodiment, the absolute e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More