Driving force controller for electric vehicle
A technology for control devices and electric vehicles, which is applied in the directions of control devices, electric vehicles, and power-consuming devices, can solve problems such as deviation, and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
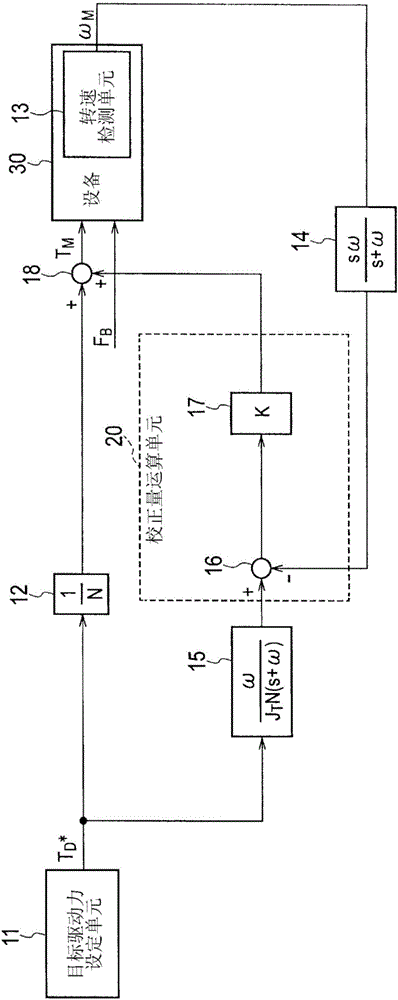
[0022] The driving force control device for an electric vehicle according to the first embodiment of the present invention can be mounted on an electric vehicle such as an electric vehicle (EV). like figure 1 As shown, the drive control device for an electric vehicle according to the first embodiment of the present invention includes a target drive force setting unit 11, a division unit 12, a target acceleration calculation unit 15, an actual acceleration calculation unit 14, a correction amount calculation unit 20 and Instruction value operation unit 18 . Each unit of the drive control device for an electric vehicle according to the first embodiment of the present invention can be constituted by a central processing unit (CPU), a memory, an arithmetic circuit, and the like. The command value calculation unit 18 is connected to a device 30 to be controlled.
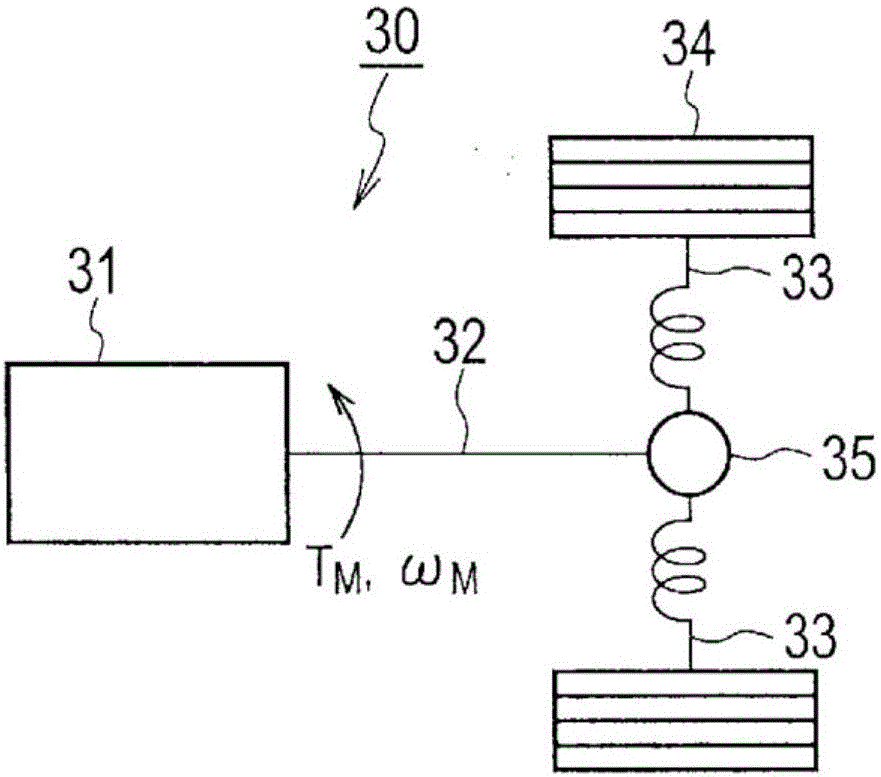
[0023] Device 30 is the drive system of an electric vehicle, such as figure 2 As shown, the device 30 has an electr...
no. 2 approach
[0052] In the first embodiment of the present invention, the inertia J of the ideal vehicle model set for calculating the target acceleration T Including motor inertia, vehicle weight and other parameters. For example, the weight of a vehicle is a value that easily changes depending on the number of passengers and the loading amount, so modeling errors often occur. When the inertia J of the ideal vehicle model T When an error occurs, the correction amount has a value even in a stable state where torsional vibration does not occur. Therefore, there is concern that the target driving force T determined by the driver's operation D There is a difference between * and the actual driving force, resulting in discomfort in the sense of acceleration. In addition, in the first embodiment of the present invention, there may be cases where the influence of modeling errors cannot be completely removed.
[0053] Here, a mechanism in which the correction amount has a value in a steady st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com