System for controlling right-angle region movement of intelligent glass cleaning robot
A glass-wiping robot and right-angle technology, which is applied in the field of intelligent robots, can solve the problems of robot turning, the cleaning effect and efficiency reduction of glass-wiping robots, and the unsatisfactory wiping effect in the right-angle area of windows, etc., to achieve the effect of reducing the number of turns and wiping efficiently
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific practical methods.
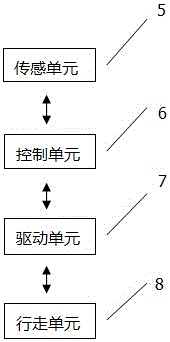
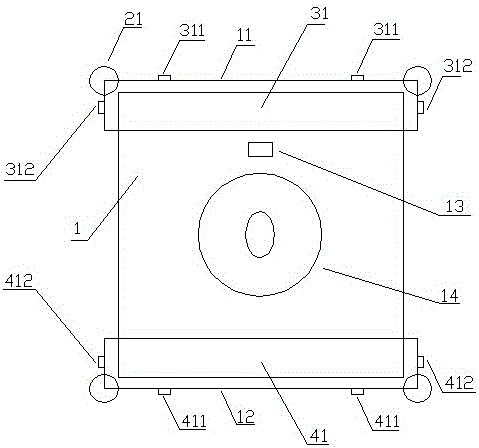
[0025] like figure 1 , 2 , 3, 4, 5, 6, and 7, a right-angle area mobile control system for an intelligent glass-wiping robot, characterized in that: the glass-wiping robot includes a sensing unit (5), a control unit (6), a drive unit (7), walking unit (8); the sensing unit includes a first sensor subunit (31) and a second sensor subunit (41); the control unit (6) is connected with the sensing unit (5) and the driving unit respectively unit(7) connection;
[0026] The first sensor subunit (31) and the second sensor subunit (41) are respectively composed of two end sensors and two side sensors, wherein the side sensors are respectively one on the left and right sides of the glass-wiping robot (1) ;
[0027] The control unit is provided with an angle sensor, and the walking pose of the glass-wiping robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com