

Magnetic force speed changing adjusting device for magnetic adsorption robot
An adjustment device and robot technology, applied in the detection field, can solve the problems of no magnetic adjustable device, no magnetic quick adjustment device, etc., and achieve the effects of good control accuracy, fast speed, and fast linear motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
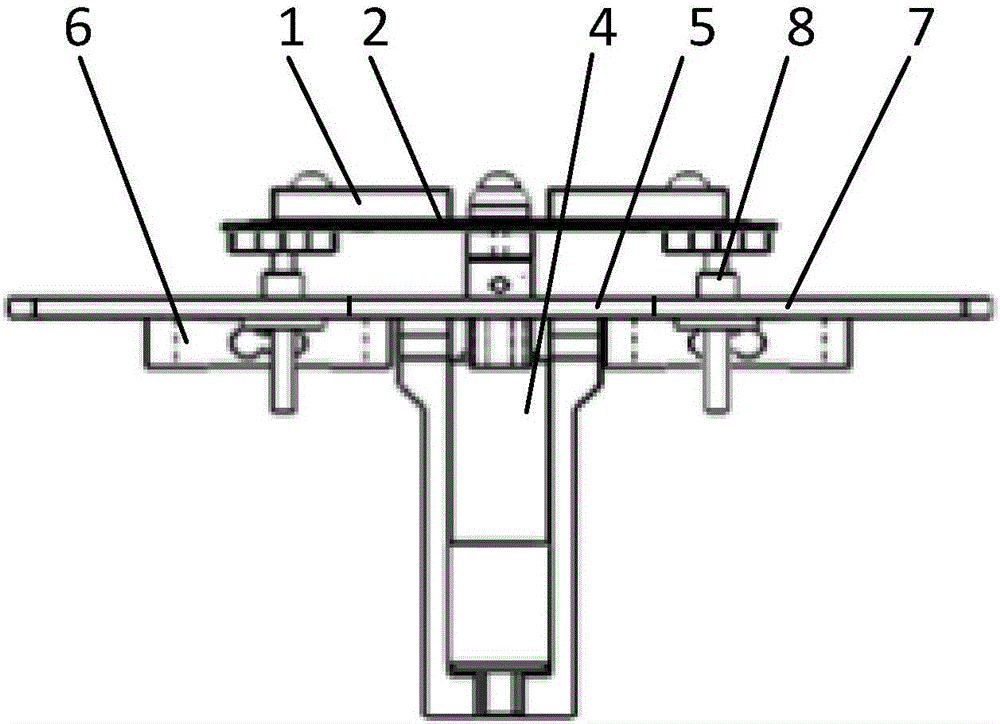
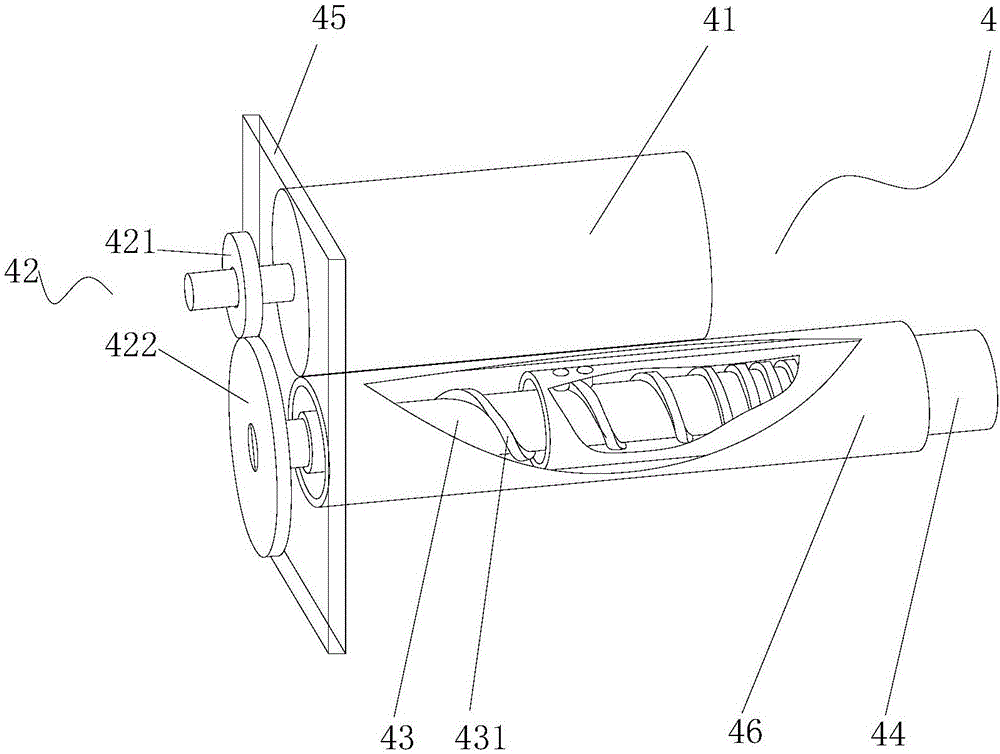
[0019] Such as figure 1 or figure 2 As shown, the present invention discloses a magnetic variable speed adjustment device for a magnetic adsorption robot, which includes a permanent magnet 1, a magnet chassis 2, a variable pitch screw linear motor 4, a support plate 5, a car body 7, a force sensor 6 and a controller (Fig. not shown), the permanent magnet 1 is installed on the magnet chassis 2, the permanent magnet 1 is arranged on one end surface of the magnet chassis 2, the variable pitch screw linear motor 4 is fixed on the support plate 5, and the variable pitch screw The linear motor 4 drives the magnet chassis 2 to move, one end of the force sensor 6 is fixed on the car body 7, the other end of the force sensor 6 is fixed on the support plate 5, the variable pitch screw linear motor 4 and the force sensor 6 are respectively connected to the controller, and the variable pitch screw linear motor 4 includes a drive motor 41, a transmission mechanism 42, a screw rod 43 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More