

Robot positioning method based on self-positioning and edge searching and system
A technology for robot positioning and autonomous positioning, applied in the directions of instruments, measuring devices, surveying and navigation, etc., can solve problems such as increased calculation amount, errors, particle positioning errors, etc., to improve accuracy and speed, broaden application scenarios, and prevent positioning errors. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The embodiments of the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. The following embodiments are only used to illustrate the technical solutions of the present invention more clearly, and therefore are only examples, and cannot be used to limit the protection scope of the present invention.
[0043] It should be noted that, unless otherwise specified, the technical or scientific terms used in this application shall have the usual meaning understood by those skilled in the art to which the present invention belongs.
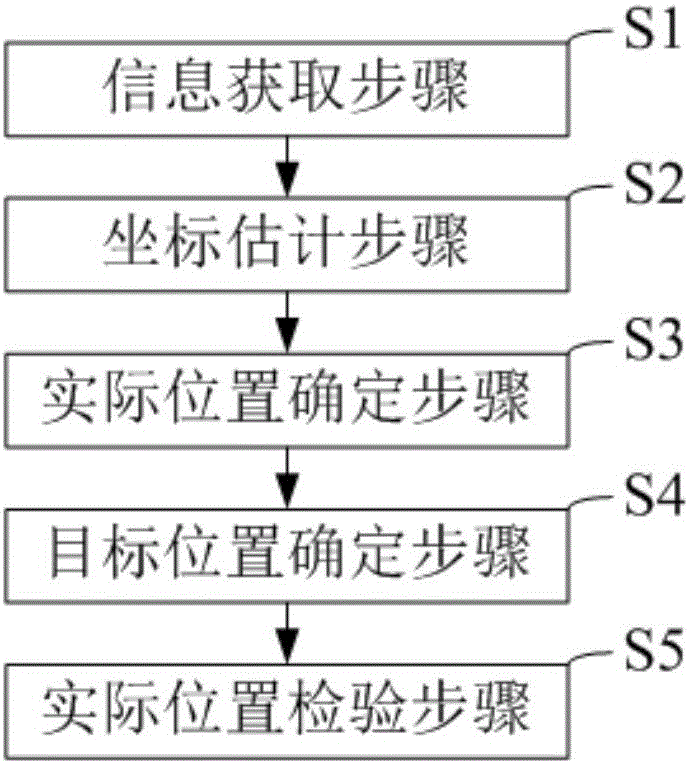
[0044] In the first aspect, embodiments of the present invention provide a robot positioning method based on autonomous positioning and edge exploration, which combines figure 1 or Figure 4 , The method includes:
[0045] Information acquisition step S1: Obtain environmental information, time information and mileage information around the robot. Here, the method can use lidar, speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More