

Multi-intelligent stand-alone servo control system based on dual redundant CAN bus communication
A servo control system and CAN bus technology, applied in the field of multi-intelligent stand-alone servo control systems, can solve problems such as lack of self-diagnosis and self-recovery, restricting command response performance, and affecting system reliability, so as not to increase communication burden and improve Effects of quickness of response, judgment-free period, and recovery time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described below in conjunction with the accompanying drawings and specific embodiments.
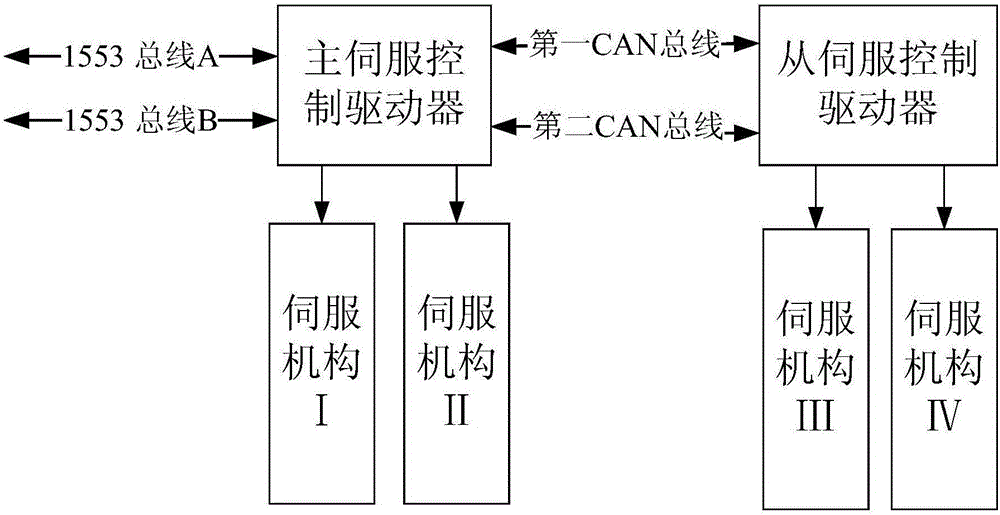
[0037] Such as figure 1 As shown, a multi-intelligent stand-alone servo control system based on dual redundant CAN bus communication includes a host computer, a master servo control driver, and a slave servo control driver. The master servo control driver communicates with the upper computer through 1553B bus A and B, and the master servo control driver and slave servo control driver communicate through the dual redundant CAN bus with equal status. The main servo control driver is used to drive the servo mechanism I and servo mechanism II installed in the I and II quadrants of the system, and the slave servo control driver is used to drive the servo mechanism III and servo mechanism IV installed in the III and IV quadrants of the system. This "one-to-two" master-slave multi-intelligent stand-alone servo control system, the master servo control driver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More