

EKF-SLAM (Extended Kalman Filter-Simultaneous Localization And Mapping) algorithm based on straight line feature map
An EKF-SLAM and linear feature technology, applied in the field of mobile robots, can solve the problems of large amount of computation and poor real-time performance, and achieve the effect of low complexity, high positioning accuracy, and obvious linear features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
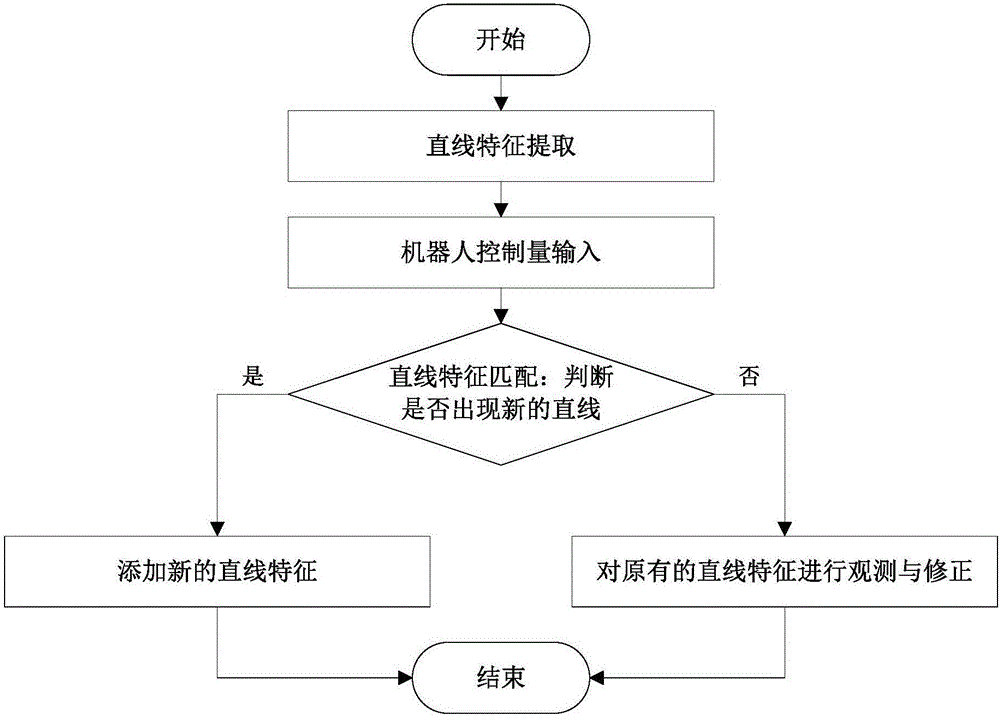
[0020] The present invention provides an EKF-SLAM algorithm based on a linear feature map, such as figure 1 shown, including the following steps:
[0021] S1. Straight line feature extraction: the system performs region segmentation and straight line fitting on the data measured by the laser radar, and obtains the parameter equation of the straight line feature.
[0022] In the present invention, environmental features are mainly composed of many segmented line segments, so region segmentation and feature extraction are our main tasks in such a structured environment. The system in the present invention refers to the mobile robot platform system.
[0023] First of all, we analyze the information directly obtained from the data scanned by the lidar. There are some points in the lidar data that will interfere with the extraction of our straight line feat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More